Ce tutoriel a pour objectif d’apprendre la programmation en langage microPython en utilisant la carte Raspberry Pi Pico. Cette carte est équipé d’un microcontrôleur RP2040. Le langage microPython est le portage du langage Python adapté aux microcontrôleurs.
Matériels & Logiciel nécessaire
- Une carte Raspberry Pi Pico
- Une câble micro-usb
- Un PC avec le logiciel Thonny (thonny.org)
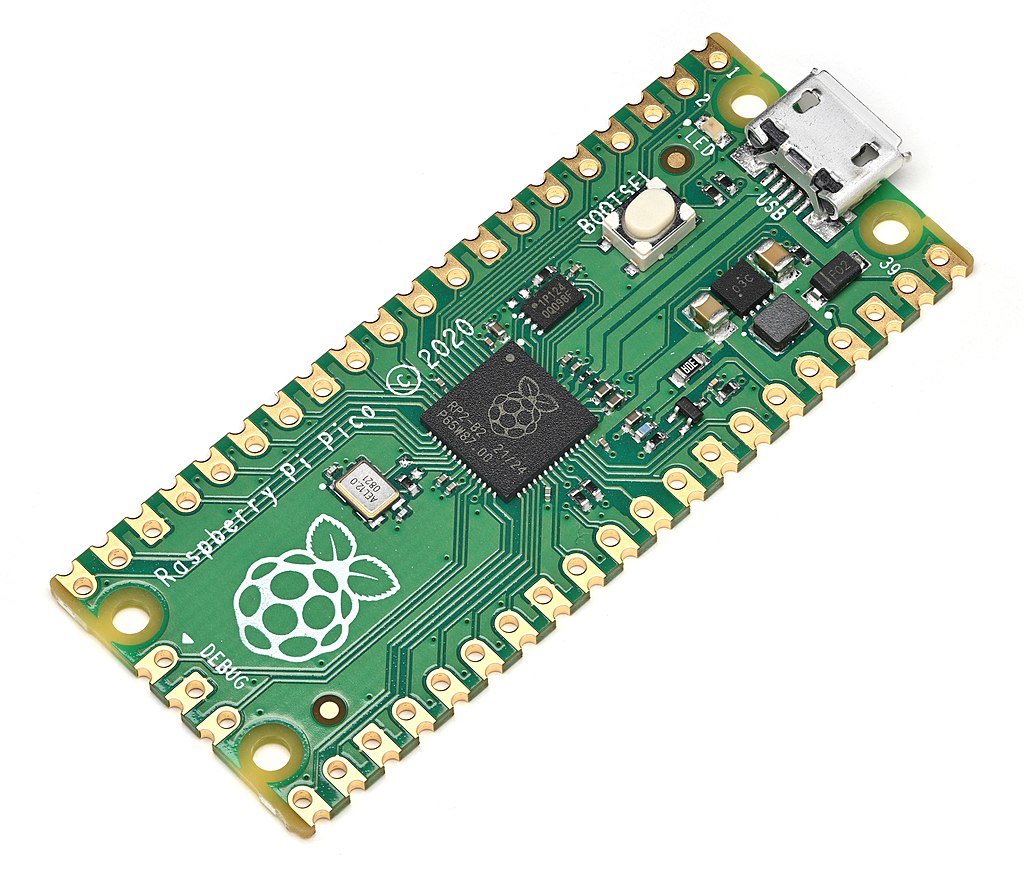
Présentation de la carte Raspberry Pi Pico
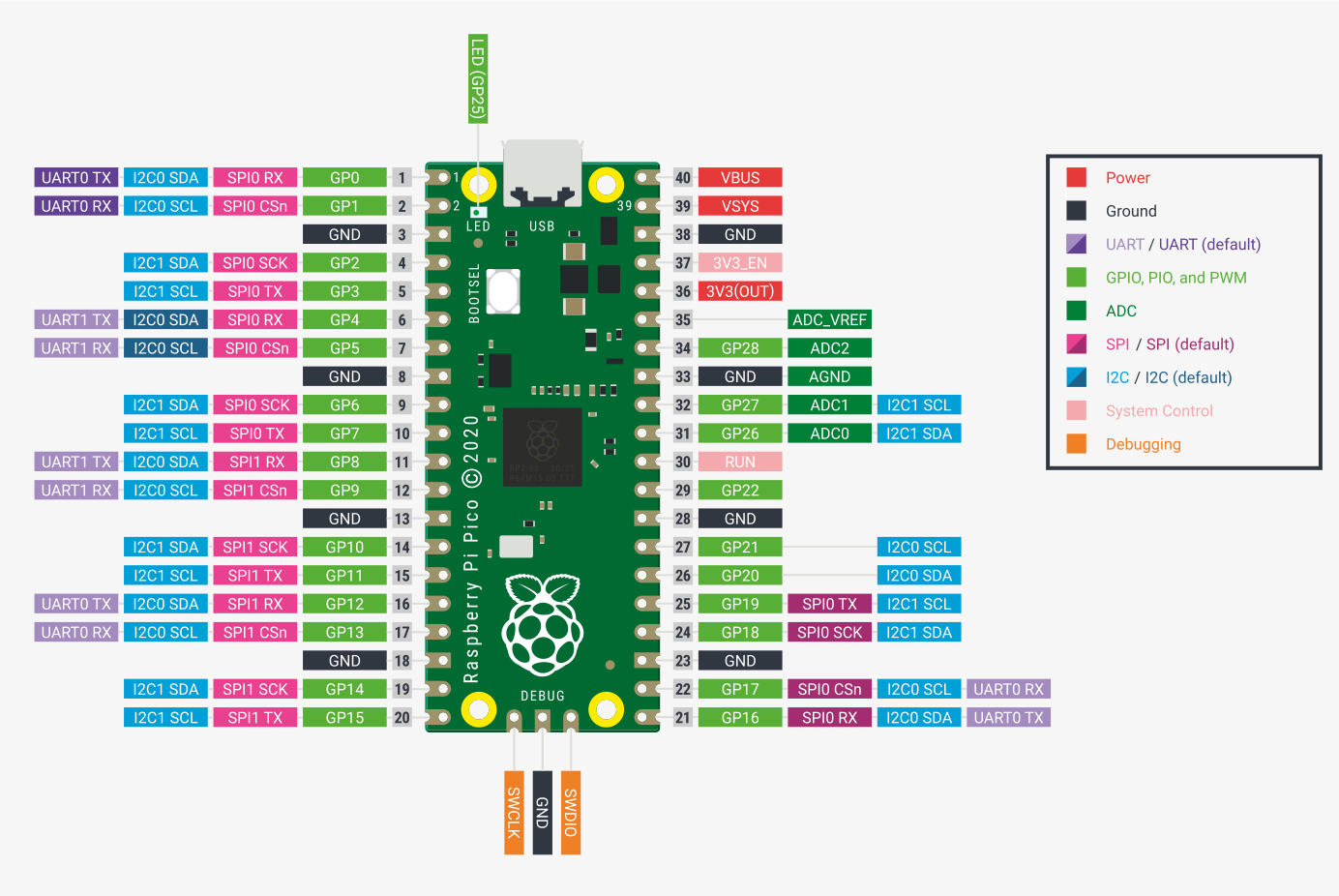
Voici le pinout de la carte Pico :
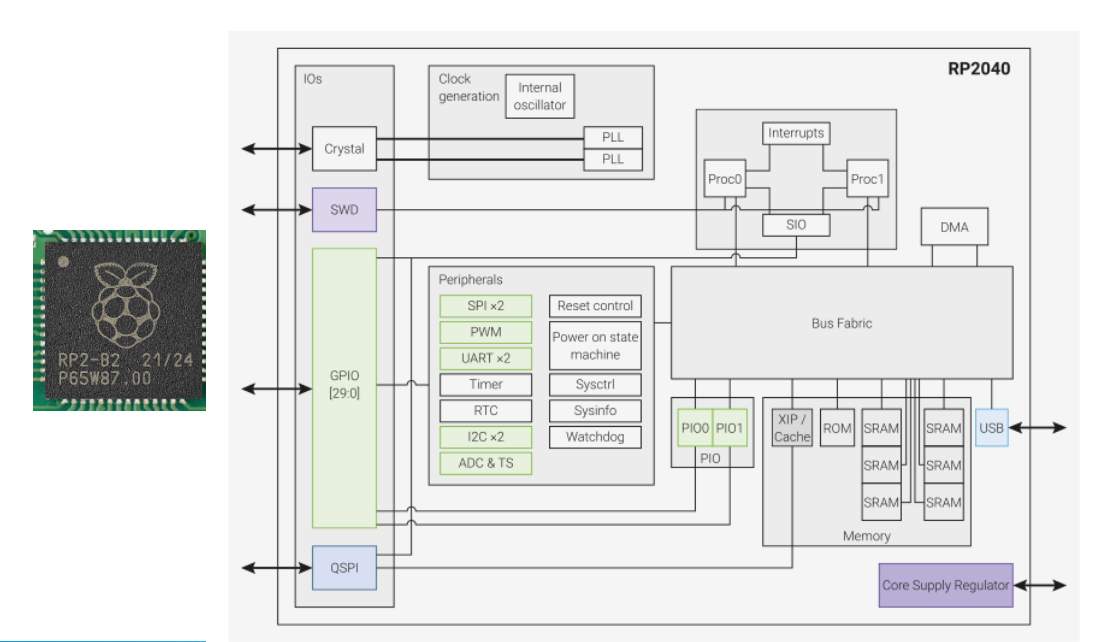
Le microcontrôleur RP2040
Voici l’architecture du microcontrôleur RP2040 :
- 2 cœur ARM Cortex M0+ à 48 Mhz (32 bits)
- 264 KB RAM
- 2MB de mémoire flash
- 26 GPIO, PWM, SPI, I2C, UART
- USB 1.1
Installation du logiciel IDE Thonny
Voir la page : thonny.org
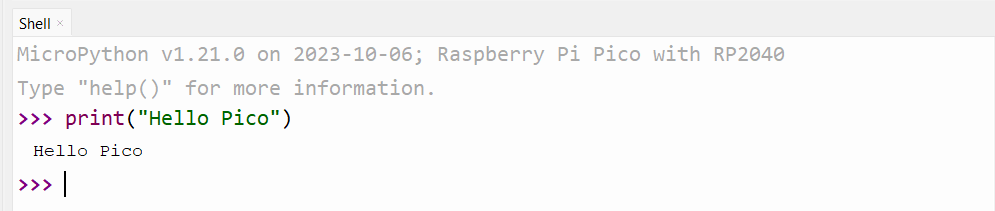
Premier programme, Hello avec le shell
Un premier exemple très simple d’affichage de texte avec la fonction print() :
Gestion d’une led avec le shell
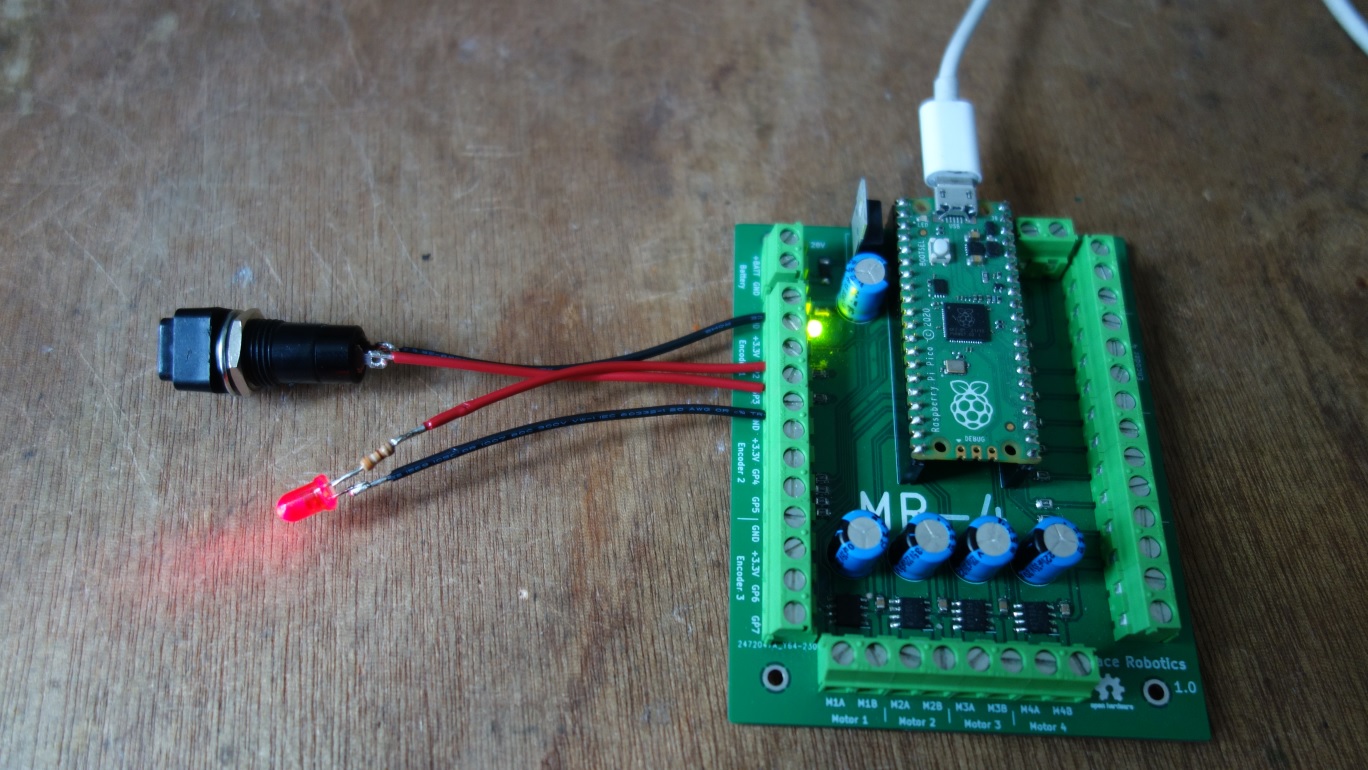
Un exemple de programmer pour allumer une led.
- La led est connecté sur la pin n°2 (GP2)
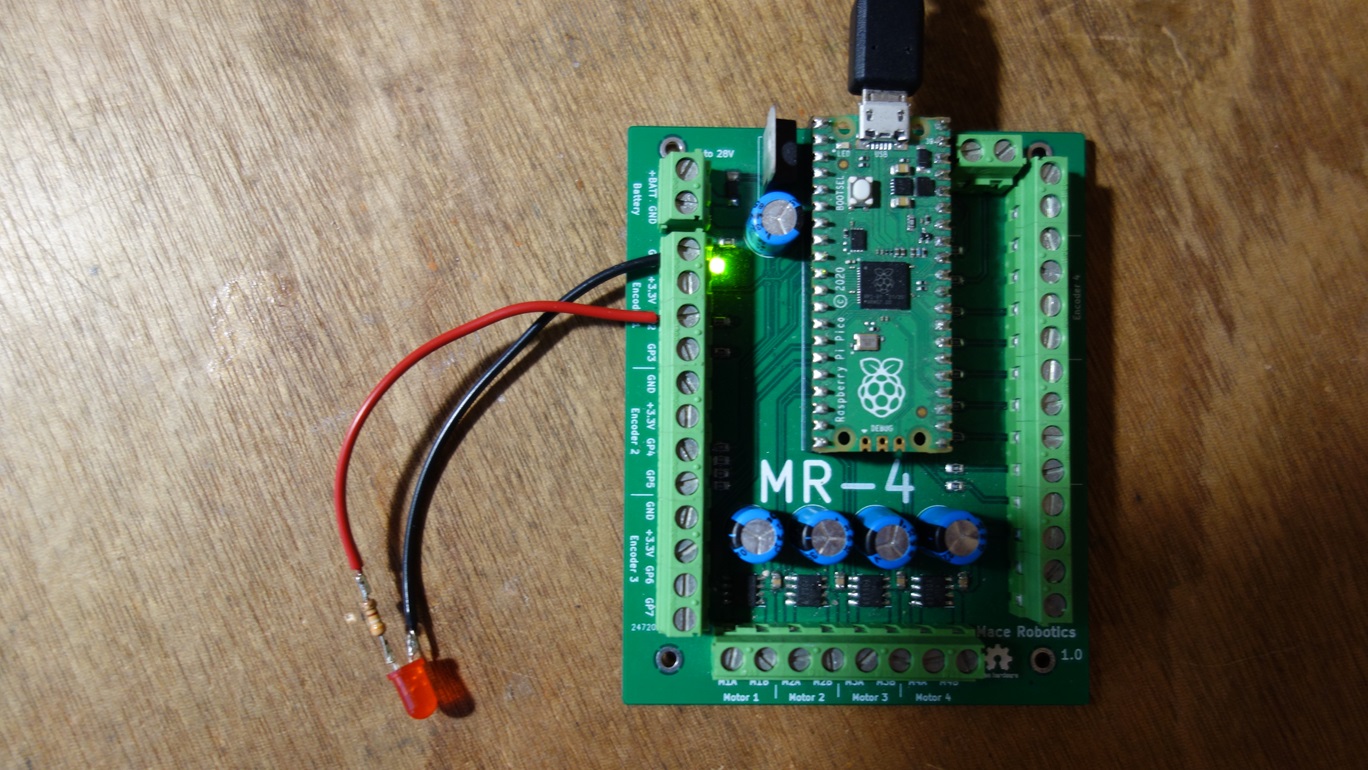
Vous pouvez essayer de taper ces lignes de code dans le shell :
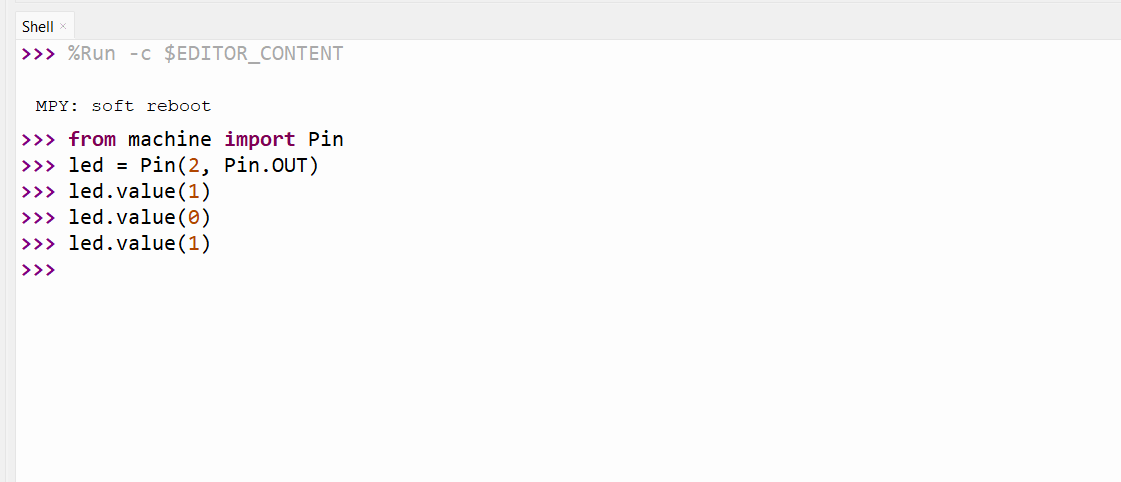
Et la lumière fut, allumer et éteindre une led !
Un exemple très simple de programme pour allumer une led :
- La led doit être connectée sur la GPIO n°2
[code language=”python”]
from machine import Pin
led = Pin(2, Pin.OUT) # configuration de la pin 2 en sortie
led.value(1) # mise à l’état haut de la pin 2, la led s’allume !
[/code]
Un exemple simple de programme pour allumer une led pendant 2 secondes et ensuite l’éteindre :
[code language=”python”]
from machine import Pin
import time
led = Pin(2, Pin.OUT) # configuration de la pin 2 en sortie
while True: # boucle infini
led.value(1)
time.sleep(2) # pause de 2 secondes
led.value(0)
time.sleep(1) # pause de 1 seconde
[/code]
Un autre exemple avec l’utilisation de la fonction toggle():
- La led va clignoter toutes les 2 secondes
[code language=”python”]
from machine import Pin
import time
led = Pin(2, Pin.OUT)
while True:
led.toggle()
time.sleep(2)
[/code]
Utilisation du shell, print
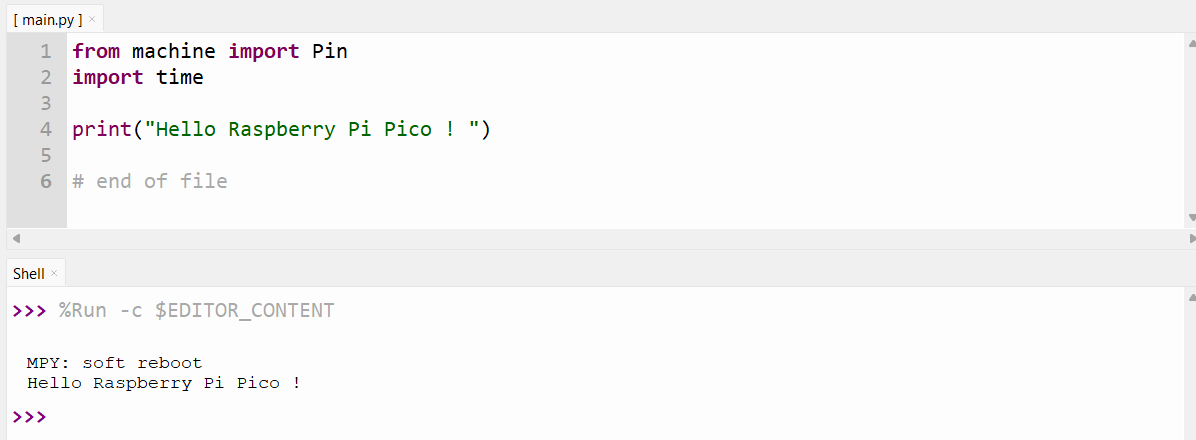
Utilisation de la fonction print() pour afficher du texte dans le shell :
[code language=”python”]
from machine import Pin
import time
print("Hello Raspberry Pi Pico ! ")
[/code]
Le résultat dans le shell :
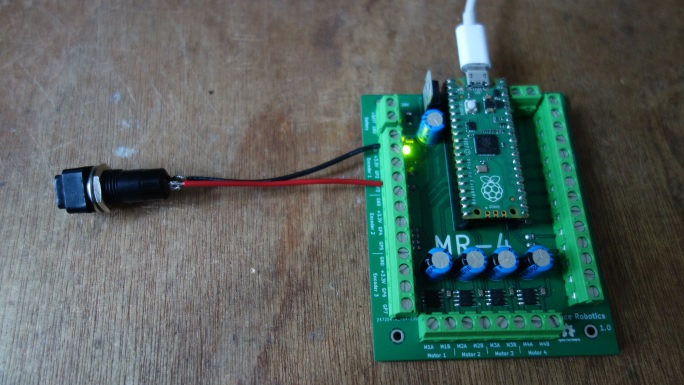
Gestion d’un bouton poussoir
Un exemple pour lire le manière continue l’état d’un bouton poussoir connecter sur la pin 3 de la carte Raspberry Pi Pico :
[code language=”python”]
from machine import Pin, ADC, PWM
import time
bouton = Pin(3, Pin.IN, Pin.PULL_UP) # configuration pin 3 en entrée
while True:
valeur = bouton.value() #Lecture de l’état du bouton
print(valeur)
time.sleep(1)
[/code]
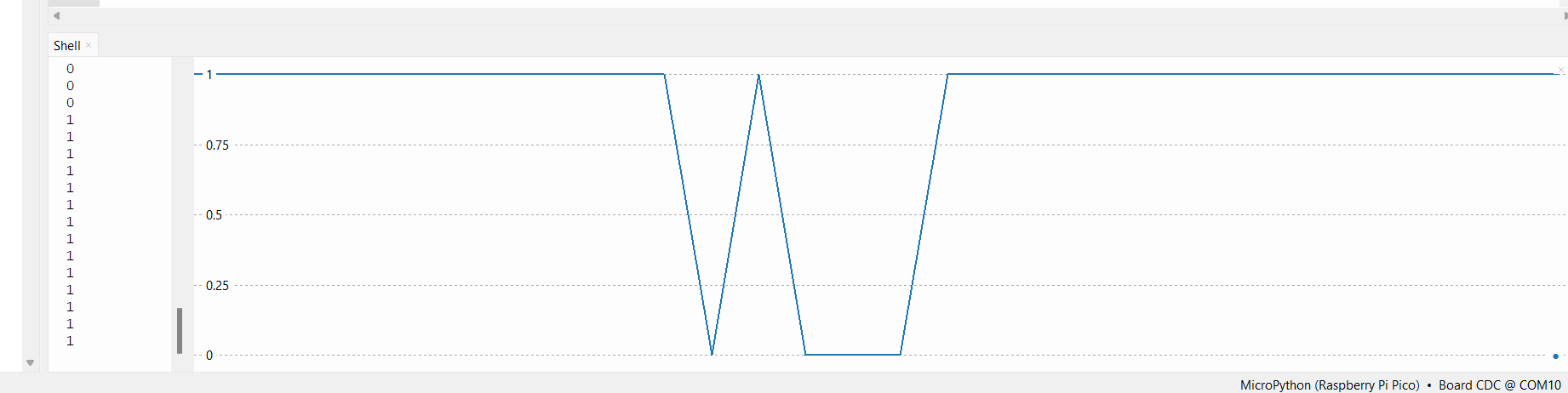
Résultat sur le shell de l’appuie sur le bouton poussoir, passage de l’état haut à l’état bas :
- Bouton non appuyé : état haut (1)
- Bouton appuyé : état haut (0)
Un autre exemple pour gérer l’allumage de la led avec le bouton :
[code language=”python”]
from machine import Pin, ADC, PWM
import time
led = Pin(2, Pin.OUT)
bouton = Pin(3, Pin.IN, Pin.PULL_UP)
while True:
valeur = bouton.value()
if valeur == 1:
led.value(1)
print("Bouton OFF")
else:
print("Bouton ON")
led.value(0)
time.sleep(0.5)
[/code]
Gestion d’une entrée analogique
Un exemple pour lire une entrée analogique :
[code language=”python”]
from machine import Pin, ADC
import time
adc = ADC(Pin(26)) # configuration pin 26 en entrée analogique
while 1:
print("Valeur adc = ", adc.read_u16())
time.sleep(0.2)
[/code]
Le résultat de la lecture de l’entrée analogique avec le Plotter :

Écriture/lecture d’un fichier texte
Un exemple très simple d’écriture dans un fichier :
[code language=”python”]
import time
file = open("test.txt", "w") # Ouverture du fichier texte.txt en mode ecriture
file.write("Ecriture dans le fichier") # ecriture dans le fichier
file.close() # fermeture du fichier
[/code]
Écriture en boucle d’une variable :
- str() : permet de convertir en chaine de caractère
- ‘\n’ : permet le saut d’une ligne
[code language=”python”]
import time
file = open("test.txt", "w")
compteur = 0
while compteur < 10:
file.write("Bonjour, compteur = ")
file.write(str(compteur) + "\n")
print(compteur)
compteur+=1
file.close()
[/code]
Gestion d’un signal PWM
- PWM : Pulse With Modulation ou modulation de la largeur d’impulsion
C’est quoi un signal PWM ?

Un exemple sur la pin 4, d’un signal PWM. Ce signal PWM permet par exemple de contrôler l’intensité lumineuse d’une led ou encore la commande en vitesse d’un moteur à courant continu.
[code language=”python”]
from machine import Pin, ADC, PWM
import time
signal = Pin(4, mode=Pin.OUT)
signal = PWM(Pin(4))
signal.freq(500) # fréquence de 500 Hz
signal.duty_u16(32000) # rapport cyclique
[/code]
Un autre exemple de génération d’un signal PWM :
[code language=”python”]
from machine import Pin, ADC, PWM
import time
signal = Pin(4, mode=Pin.OUT)
signal = PWM(Pin(4))
signal.freq(500)
for rapport in range(0,65_536):
signal.duty_u16(rapport)
print(rapport)
time.sleep(0.001)
[/code]
Contrôle d’un servomoteur
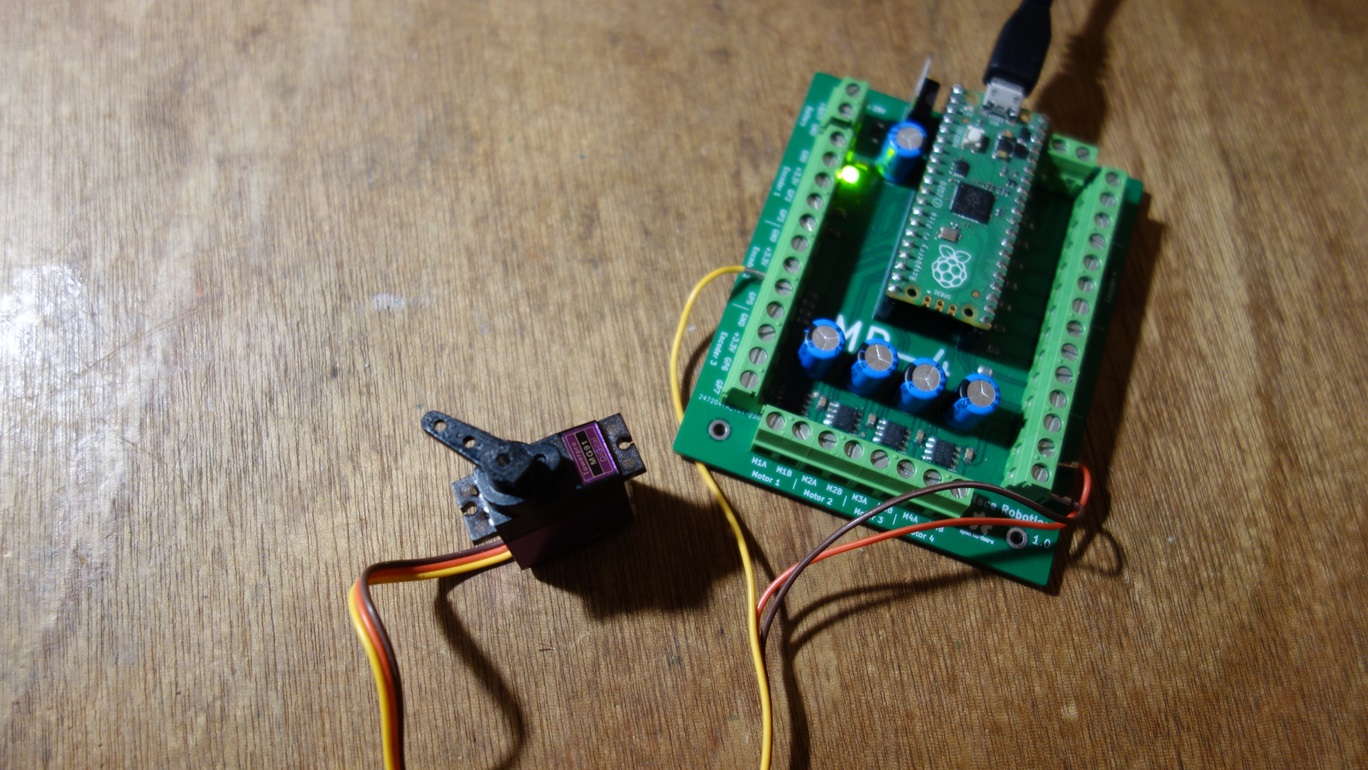
Maintenant, passons au contrôle d’un servomoteur en microPython.
Connexion du servomoteur :
- Fil rouge : +5V
- Fil noir : GND
- Fil orange : GPIO 4
Un exemple de programme pour le contrôle d’un servomoteur :
- Configuration de la GPIO 4 en signal PWM
- Pour le contrôle d’un servomoteur la fréquence doit être de 50 Hz
- Le contrôle angulaire d’un servomoteur varie en fonction du rapport cyclique (entre 1 et 2 ms environ, dépends du type de servomoteurs)
[code language=”python”]
from machine import Pin, PWM
import time
servo = Pin(4, mode=Pin.OUT)
servo = PWM(Pin(4))
servo.freq(50)
while True:
servo.duty_u16(2314)
time.sleep(2)
servo.duty_u16(7600)
time.sleep(2)
[/code]
Allumer une led avec un timer !
Un exemple d’utilisation d’un timer pour faire clignoter la led interne de la carte Raspberry Pi PICO toutes les secondes :
[code language=”python”]
from machine import Pin, Timer
led = Pin("LED", Pin.OUT)
timer_led = Timer()
def mon_timer_led(timer):
global led
led.toggle()
timer_led.init(freq=1, mode=Timer.PERIODIC, callback=mon_timer_led)
[/code]
Interruption matérielle avec un bouton poussoir
Un exemple de programme pour gérer l’appui d’un bouton poussoir avec une interruption matérielle (IRQ). Une interruption matérielle est déclenchée par une entrée (GPIO) du microcontrôleur. Dans cet exemple, l’entrée 3 est configurée en interruption.
[code language=”python”]
from machine import Pin
import time
def mon_interruption(pin):
print("Bouton ON")
bouton = Pin(3, Pin.IN, Pin.PULL_UP) # configuration du bouton sur l’entée 3
bouton.irq(trigger=Pin.IRQ_FALLING,handler=mon_interruption)
# boucle infini
while True:
print("Boucle infini, attendre …") # attendre l’appuie sur le bouton
time.sleep(1)
[/code]
Programmation multicore
Le microcontrôleur RP2040 possédé 2 cœurs de processeur (ARM Cortex M0+) de 133 Mhz:
- Core0
- Core1
[code language=”python”]
from time import sleep
import _thread
def core0_thread():
compteur= 0
while True:
print("Hello, Je suis le core0 : ", compteur)
compteur+= 1
sleep(1)
def core1_thread():
compteur= 1
while True:
print("Hello, Je suis le core1 : ", compteur)
compteur+= 1
sleep(3)
thread_core1 = _thread.start_new_thread(core1_thread, ())
core0_thread()
[/code]
Fin du Tuto !