Tutoriel vidéo pour apprendre à programmer avec Blockly le robot MRduino.
- Allumer et éteindre une led avec la gestion du temps.
Tutoriel vidéo pour apprendre à programmer avec Blockly le robot MRduino.
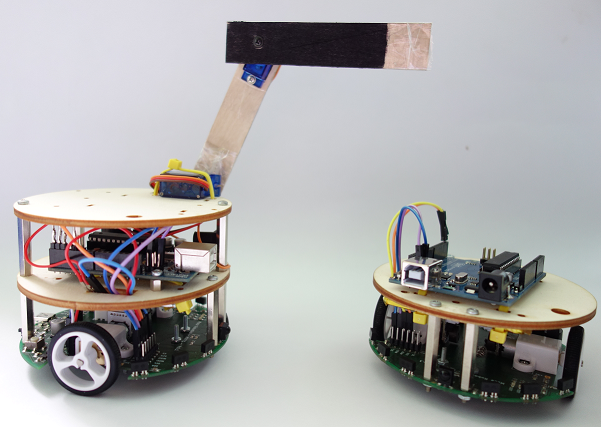
Le robot MRduino joue au football pour l’Euro 2016.
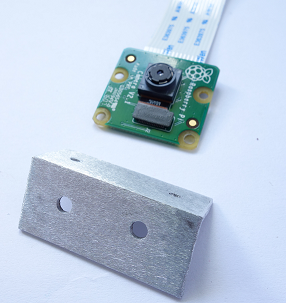
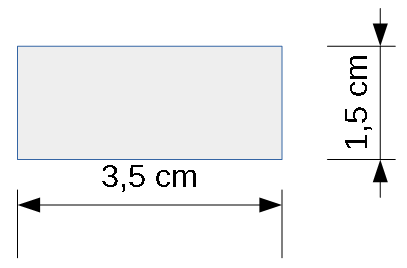
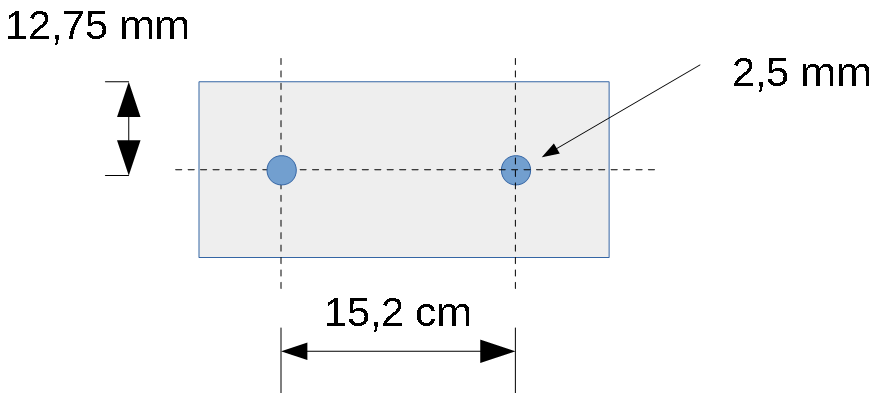
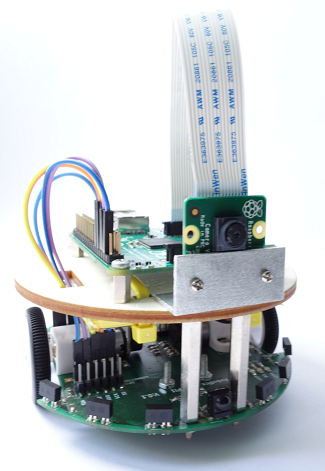
MRduino est équipé d’un bras avec deux servomoteurs SG90 :
#include <Servo.h>
#include <mrduino.h>
Servo Servo1;
Servo Servo2;
int reception;
void setup()
{
Servo1.attach(2, 1000, 2000);
Servo2.attach(4, 1000, 2000);
Servo1.write(90);
Servo2.write(180);
delay(500);
Serial.begin(115200);
}
void loop() {
// read IR reception sensor
reception = irReceiver();
// read command
switch(reception)
{
case 2:
forward(30);// Forward
break;
case 6:
turnRight(30);// turn right
break;
case 4:
turnLeft(30);// turn left
break;
case 8:
back(30);// back
break;
case 5:
stop();// stop
break;
case 7:
Servo1.write(160);
Servo2.write(90);
break;
case 9:
Servo1.write(90);
Servo2.write(180);
break;
}
}
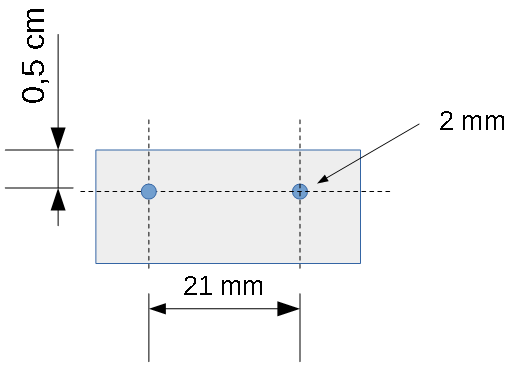
Le robot MRPi1 est équipé d’un accéléromètre 3 axes permettant de détecter les chocs.
Voici une petite vidéo :
Ce programme lit les 3 axes de l’accéléromètre et suivant un seuil d’accélération de 0.1 g une led est allumé ou éteinte.
Le programme python :
from mrpi1_lib import * import time while 1: axeX = acceleroX(); axeY = acceleroY(); axeZ = acceleroZ(); time.sleep(0.01) if(axeX > 0.1): led(1,1) else: led(1,0) if(axeY > 0.1): led(2,1) else: led(2,0) if(axeZ > 0.1): led(3,1) else: led(3,0)
Programme de contrôle du robot MRduino avec une télécommande :
#include <mrduino.h>
int reception;
void setup()
{
// init serial communication
Serial.begin(115200);
}
void loop()
{
// read IR reception sensor
reception = irReceiver();
// read command
switch(reception)
{
case 2:
forward(30);// Forward
break;
case 6:
turnRight(30);// turn right
break;
case 4:
turnLeft(30);// turn left
break;
case 8:
back(30);// back
break;
case 5:
stop();// stop
break;
}
}
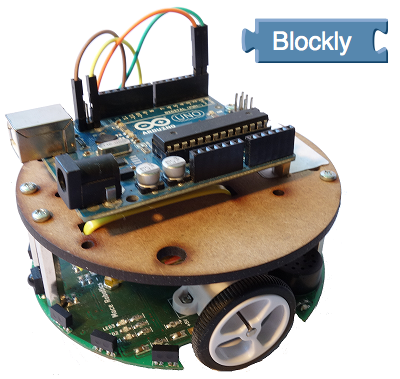
Il est maintenant possible de programmer le robot MRduino en Blockly.
Mais c’est quoi Blockly ?
![]()
Blockly est un langage de programmation visuelle Open source sous forme de puzzle. Les pièces du puzzle représente une fonction.
Exemple de programme Blockly pour le robot MRduino :
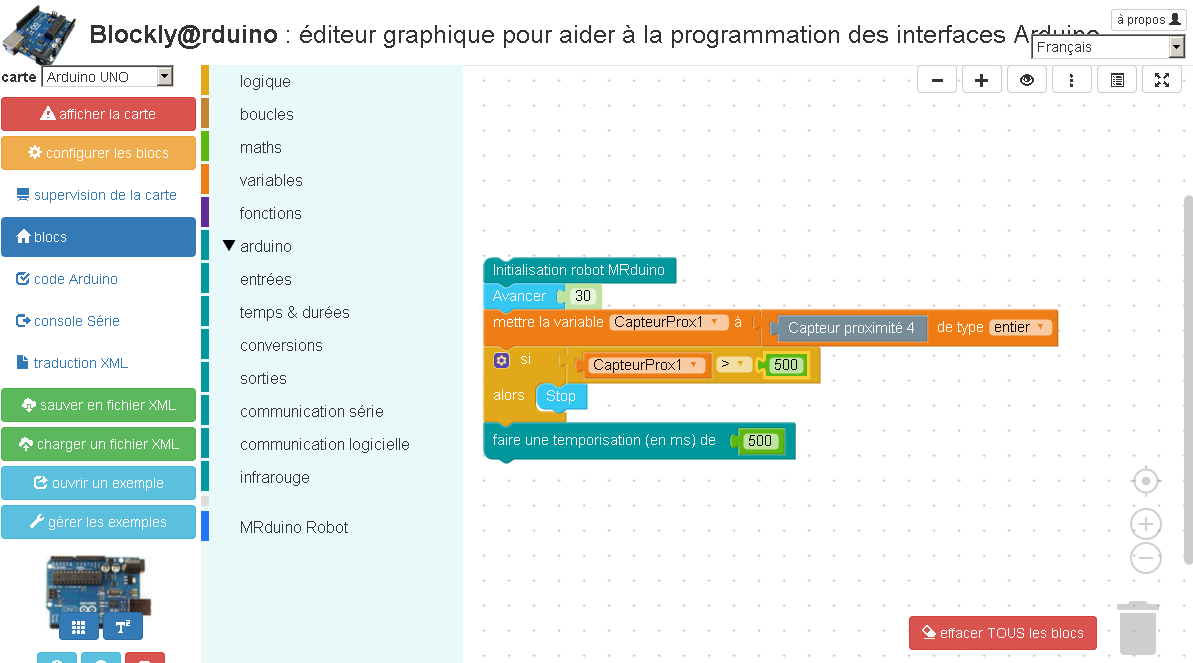
Ce programme permet de faire avancer le robot MRduino tant qu’il n’y a pas d’obstacle présent sur le capteur de proximité n°4.
Guide de démarrage du robot MRduino avec Blockly.
Exemple of obstacle avoidance with MRduino robot. This program use the six proximity sensors.
 The obstacle avoidance program :
The obstacle avoidance program :
#include <mrduino.h> int prox1; int prox2; int prox3; int prox4; int prox5; int prox6; int speed = 50 // obstacle limit int limit_obs = 300; void setup() { // init serial interface Serial.begin(115200); } void loop() { // read sensors prox1 = proxSensor(1); prox2 = proxSensor(2); prox3 = proxSensor(3); prox4 = proxSensor(4); prox5 = proxSensor(5); prox6 = proxSensor(6); delay(100); if((prox1 > limit_obs) and (prox2 > limit_obs)and (prox3 > limit_obs) and (prox4 > limit_obs) and (prox5 > limit_obs) and (prox6 > limit_obs)) { back(speed); } else { if((prox1 > limit_obs) and (prox2 > limit_obs)) { turnRight(speed); } else { if((prox6 > limit_obs) or (prox5 > limit_obs) or (prox4 > limit_obs)) { turnLeft(speed); } else { if((prox1 > limit_obs) or (prox2 > limit_obs) or (prox3 > limit_obs)) { turnRight(speed); } else { forward(speed); } } } } } // end of file
Pour recharger la batterie du robot MRduino vous avez besoin :
Ensuite pour recharger la batterie du robot :
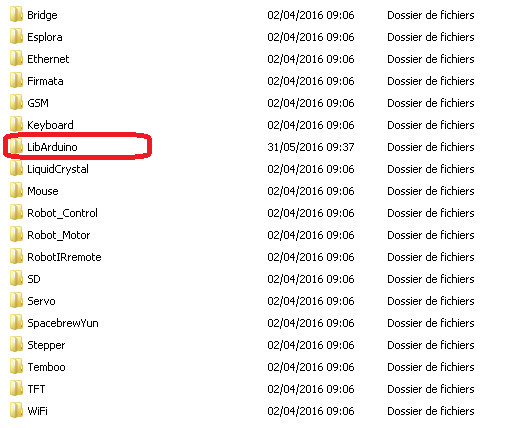
Télécharger un dossier zip du répertoire du Github, à cette adresse :
https://github.com/macerobotics/MRduino
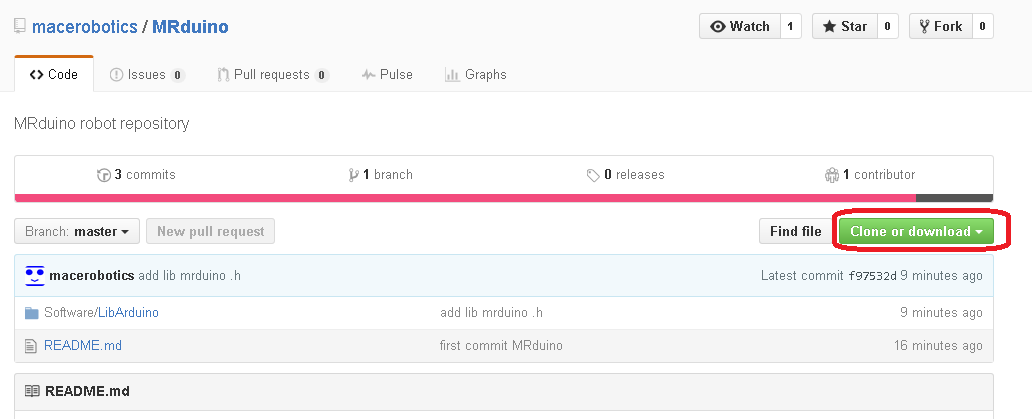
Choisissez ‘Dowload ZIP” :
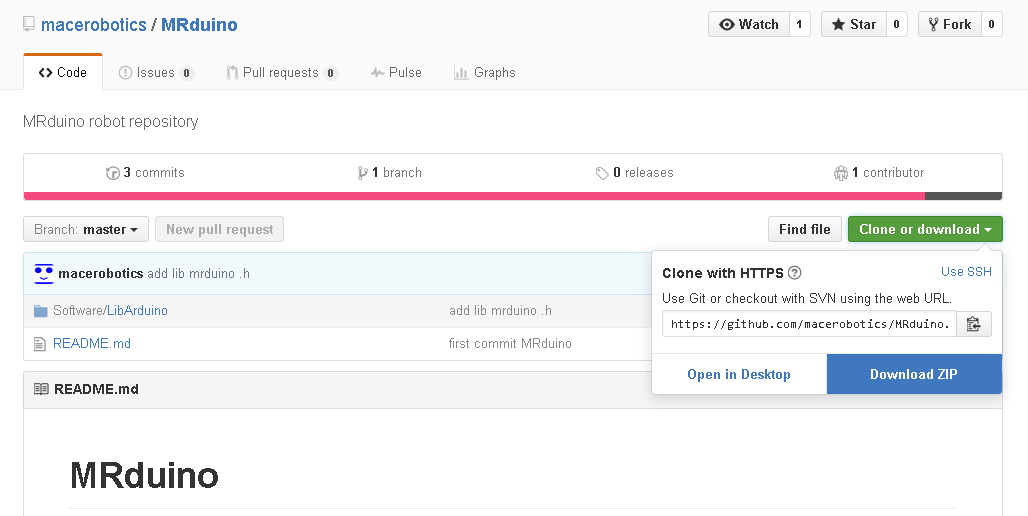
Dossier télécharger :
![]()
Je considérè que vous avez installer l’IDE Arduino. Voici un lancement sous Windows :
Double-cliquez sur le logo de l’IDE Arduino :
![]()
L’IDE doit se charger :
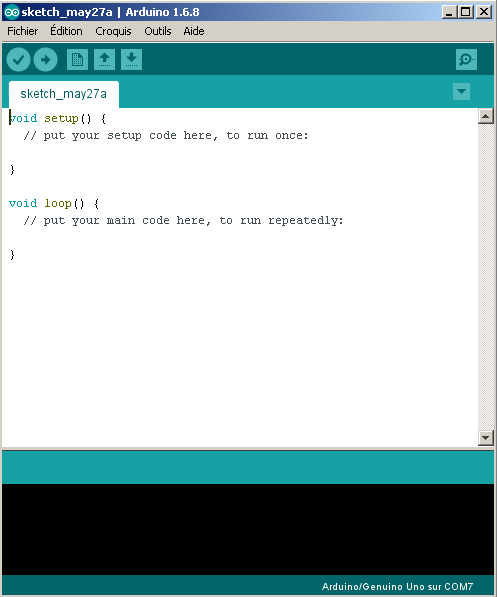
Voici la fenêtre d’édition principale du logiciel Arduino :
#include <mrduino.h>
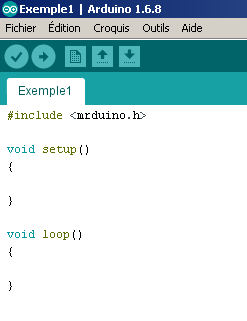
Exemple pour faire avancer le robot MRduino :
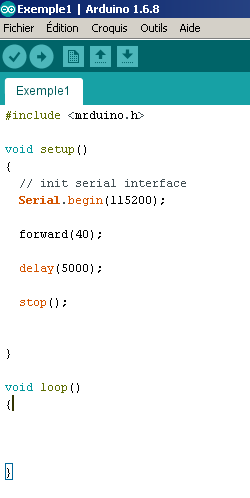
Serial.begin(115200);
forward(40);
delay(5000);
stop();
Une fois que vous avez éditer ce petit programme, vous pouvez le compiler.
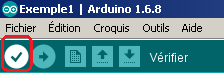
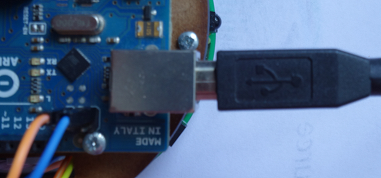
Le programme Vérifier, vous pouvez relier la carte Arduino Uno à votre PC via un câble usb AB. Le robot doit être éteint, bouton en positon off.
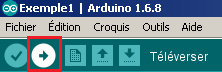
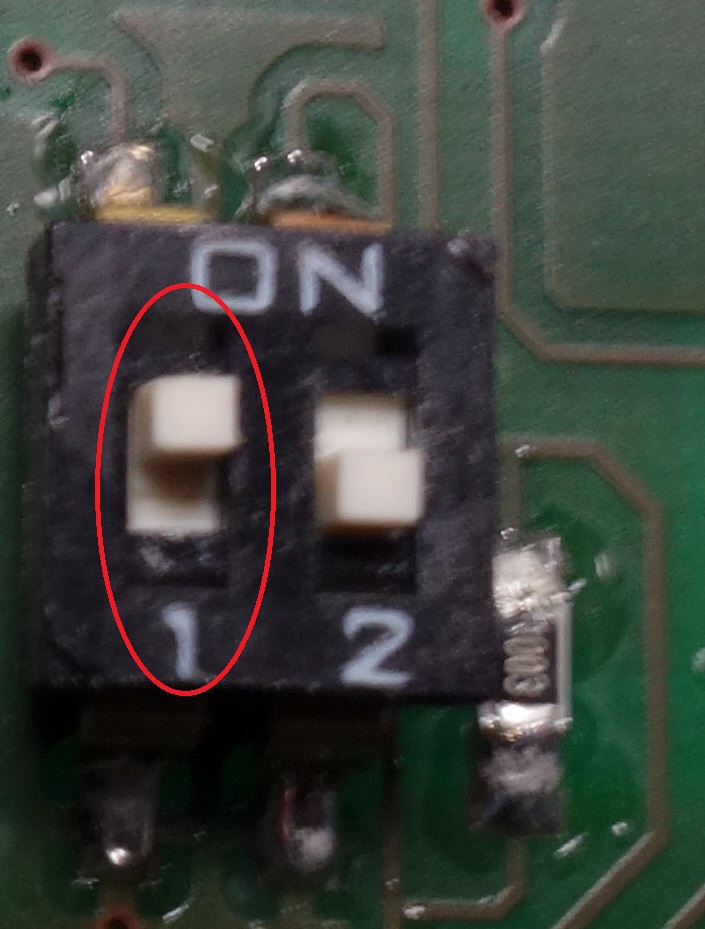
Une fois le programme Téléverser, vous pouvez :