Category: Non classé
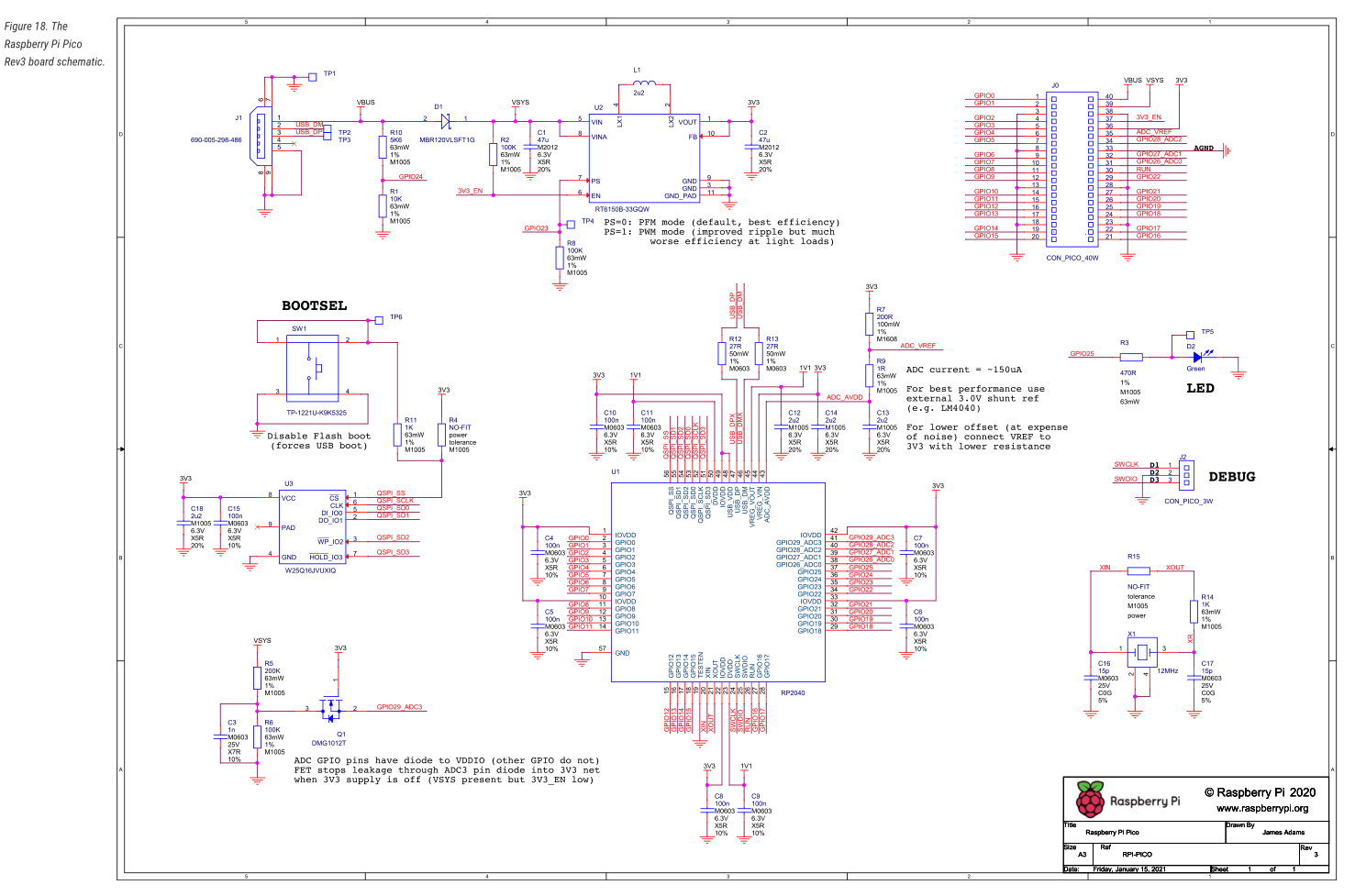
Schéma de la carte Raspberry PI PICO
Service
Plus d’informations : https://fr.macerobotics.com/services/
Repasse à Hirondelle
Une repasse à hirondelle basée sur un système Raspberry Pi, installée près de Rennes :

Ouverture d’une batterie de vélo électrique
Le pack
Ouverture d’une batterie de vélo électrique d’une tension de 36V :
- 2×10 éléments de 3.7V – 5000 mAH
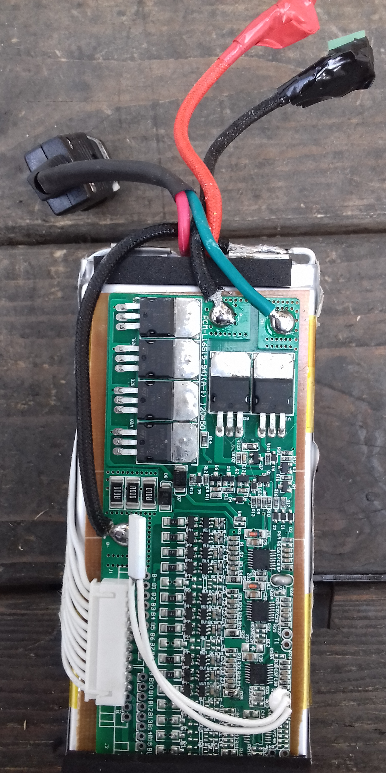
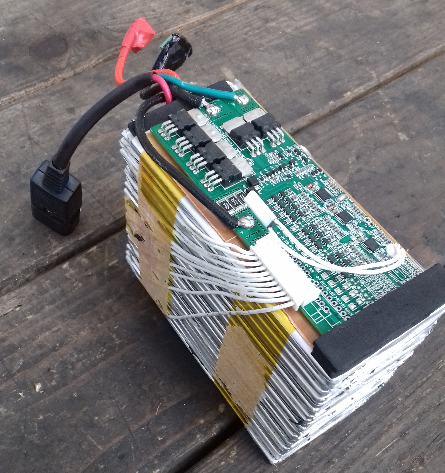
Le BMS : battery management system
- Mosfet : STP75NF75
- S-8204B : battery protection
Nouvelle vidéo :
Kit robotique disponible en boutique : https://shop.macerobotics.com/produit/kit-chassis-mr-rescue/
Gestion du buzzer et de la led RGB
Un tutoriel pour gérer le buzzer et le led RGB du robot mobile MRPiZ (version 0.8) en langage C.
Exemple n°1 : faire du bruit
Un exemple pour utiliser le buzzer :
- frequency : fréquence du signal
buzzer(frequency)
Exemple n°2 : faire de la lumière
Un exemple pour utiliser la led RGB :
- red, green, blue :
- 0 : off
- 1 : on
ledRGB(red, green, blue)
IMU test – quadruped robot
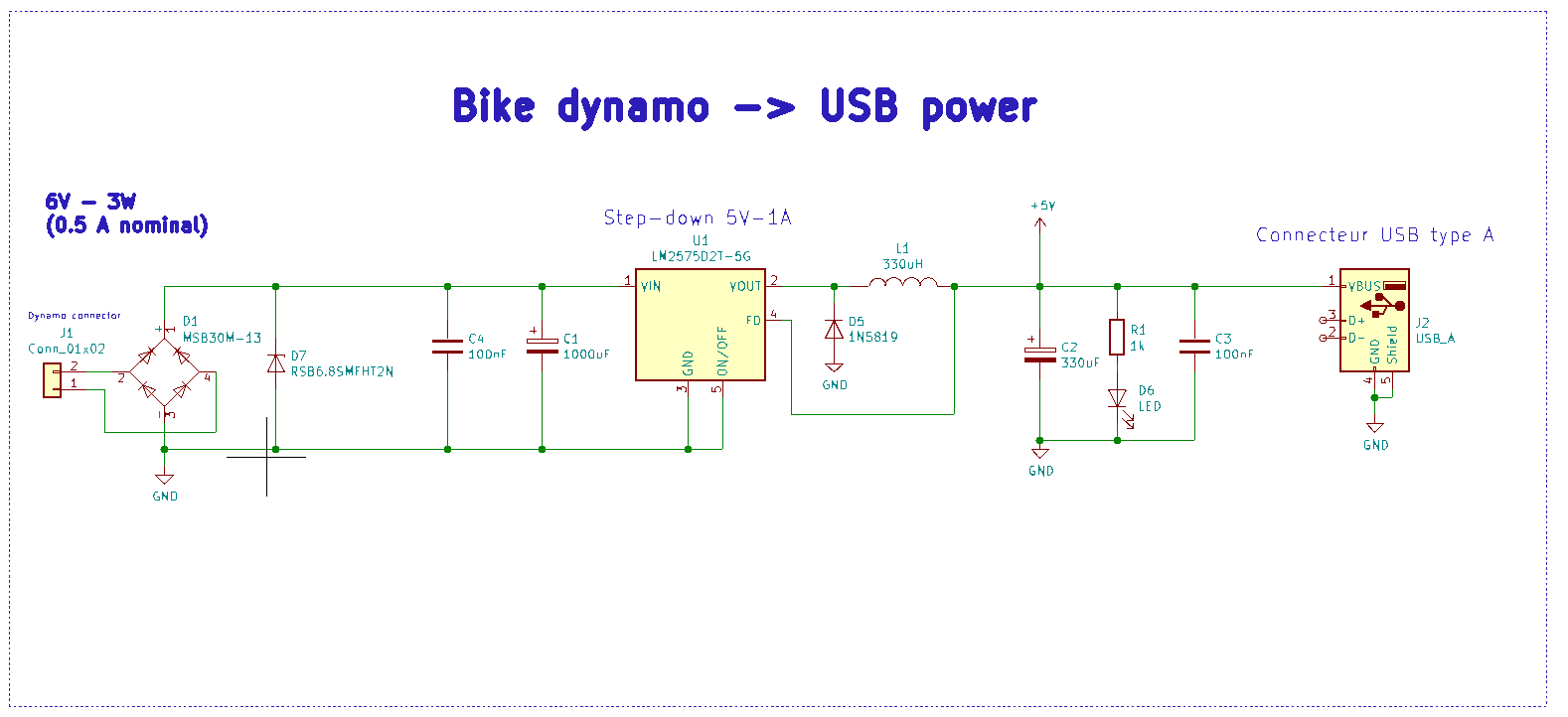
Régulateur USB 5V pour dynamo de vélo
Un schéma électronique pour obtenir une tension 5V sur un connecteur USB à partir d’une dynamo de vélo. Une dynamo de vélo délivre une tension alternative monophasée de 6V et une puissance maximale de 3W.
Le schéma électronique
- Pont de diode, diode zener 6.8V
- Régulateur step-down LM2575,
- Condensateur de sortie,
- Led,
- Connecteur USB