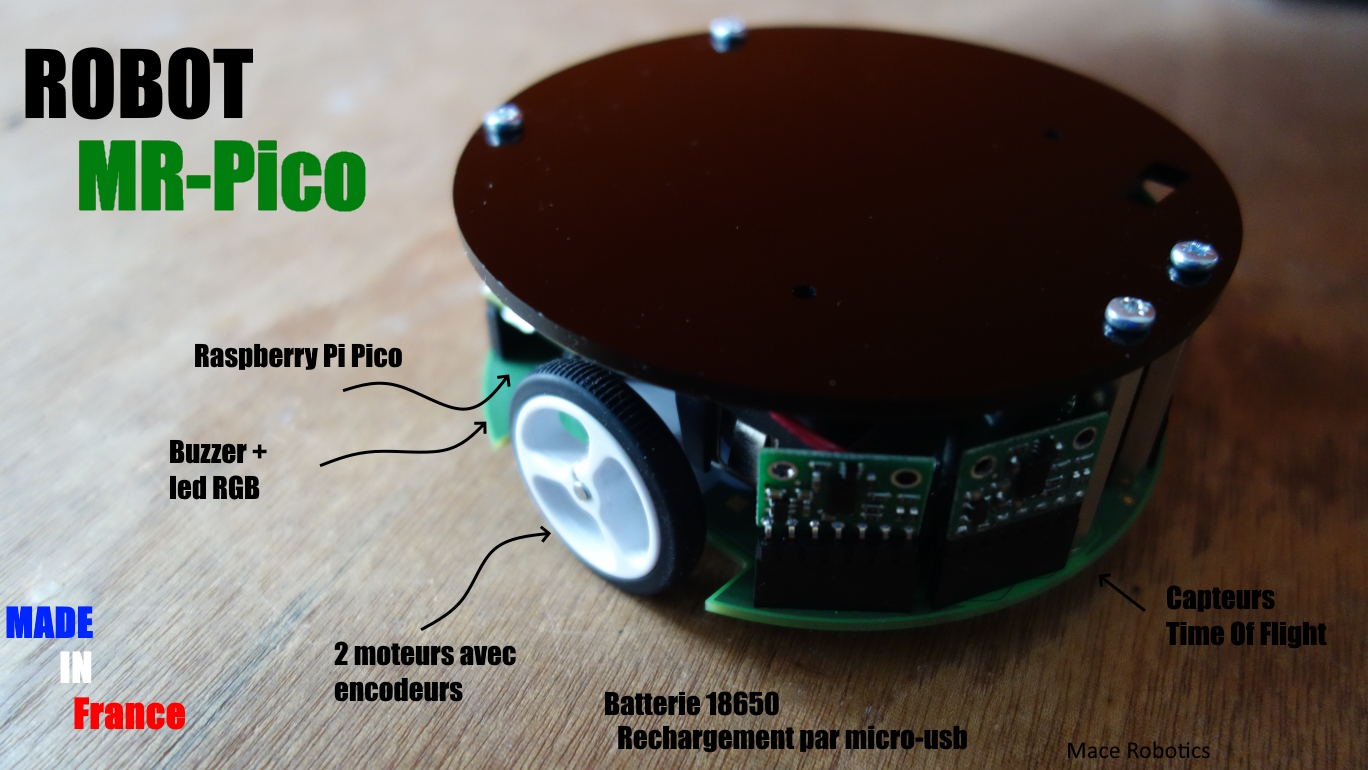
Un nouveau robot est en cours de conception :
- basé sur une carte Raspberry Pi 5 ou zero 2W
- 2 roues
- 2 encodeurs magnétiques
- 5 capteurs ToF
- Microcontrôleur : Raspberry Pi Pico
- Open source (Hardware + software)
Châssis :
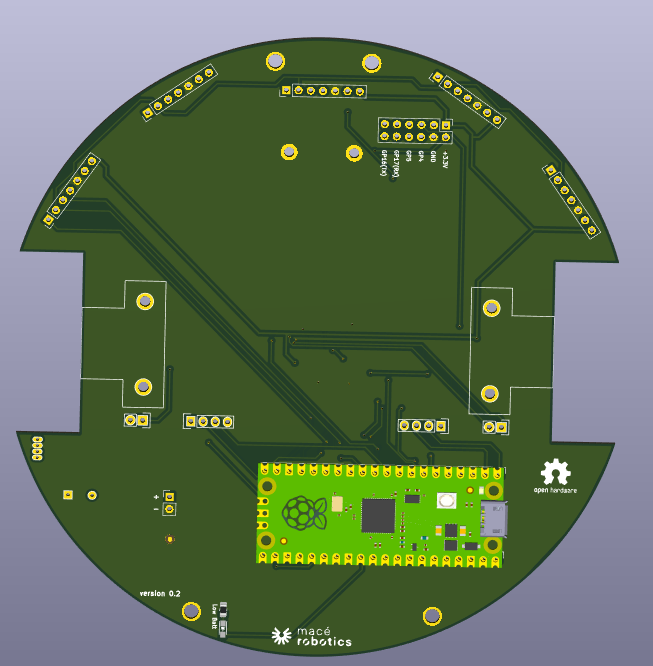
Un nouveau robot est en cours de conception :
Châssis :
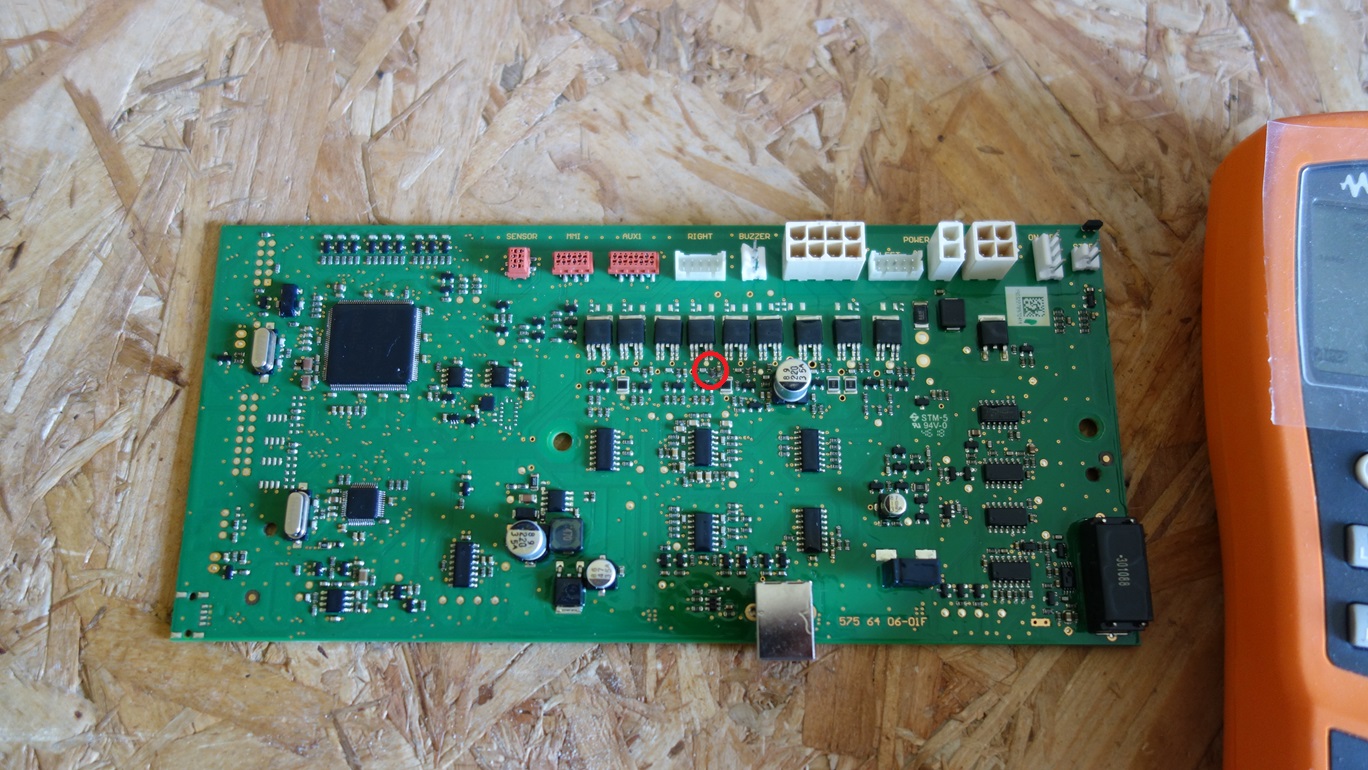
Réparation d’une carte de robot tondeuse Husqvarna :
Mace Robotics est sponsor de l’équipe de robotique des apprentis ingénieurs de l’ENSTA Bretagne pour la participation à la coupe de France de robotique. Les participant·e·s doivent concevoir un robot autonome, ce concours est du 28 au 31 mars à la Roche sur Yon.

Site web de l’équipe :
Un nouveau robot open source en phase de test :
Un robot innovant et entièrement open source est actuellement en cours de développement, basé sur la plateforme Raspberry Pi :
Nom du robot : MR-25
Microcontrôleur embarqué : Raspberry Pi Pico
Compatibilité : Raspberry Pi 5, 4, Zero W, etc.
Alimentation : Module UPS 18650 – 5V / 3A
Le MR-25 a été conçu pour offrir une base robuste et évolutive pour des projets en robotique mobile, mêlant puissance de calcul et modularité.
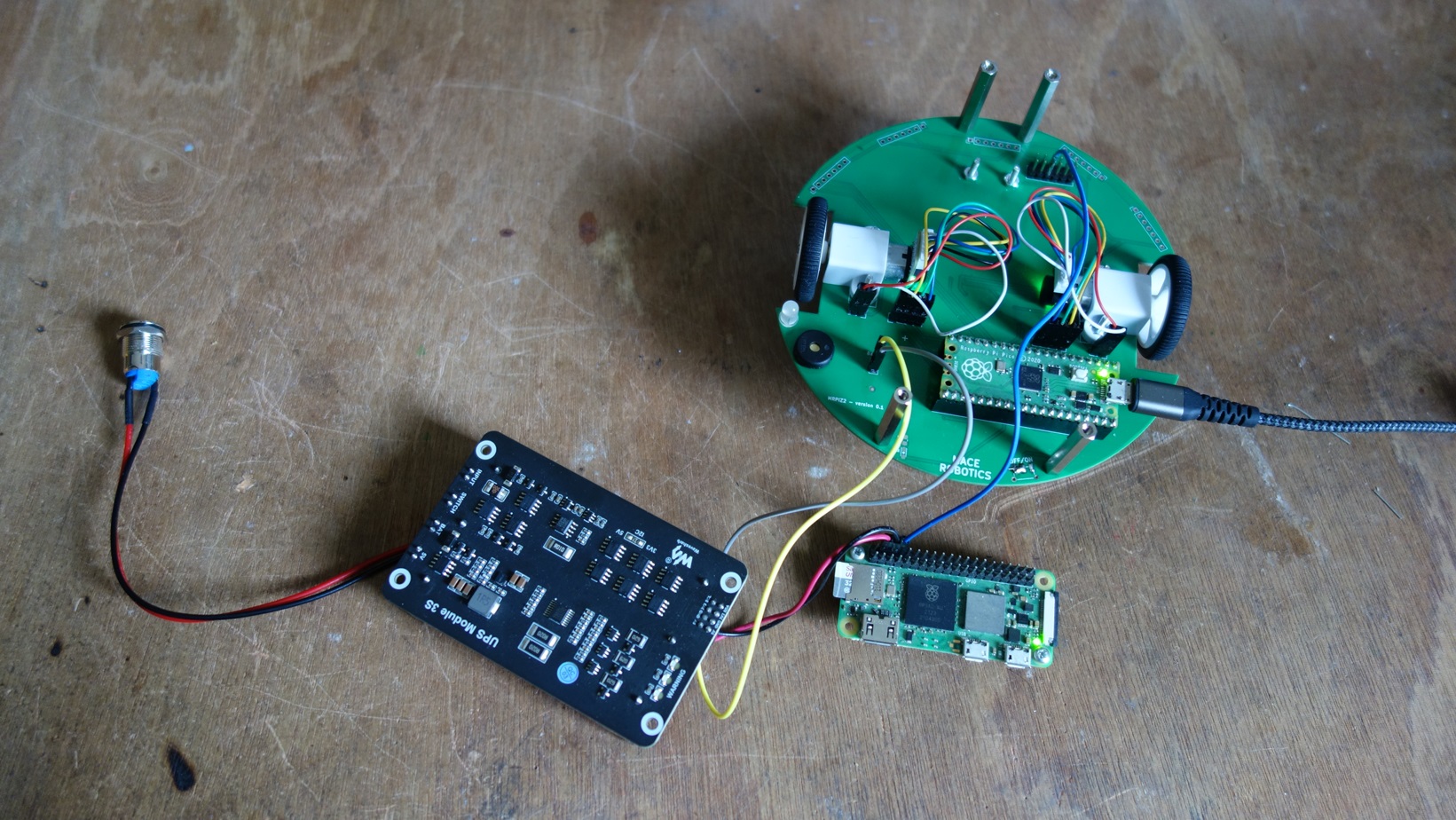
Bientôt, une nouvelle version du robot MRPiZ sera disponible, il sera basé sur une carte Raspberry Pi 5.
Test de la carte Raspberry Pi 5 avec un UPS 3S – 5V – 3A :

Dans le domaine de la robotique mobile, le choix du moteur électrique joue un rôle crucial dans la performance, la durabilité et l’efficacité énergétique des robots. Les moteurs sont responsables de la conversion de l’énergie électrique en mouvement mécanique, ce qui permet aux robots de se déplacer, de manipuler des objets ou d’accomplir diverses tâches. Parmi les technologies les plus courantes, on trouve les moteurs à courant continu (CC) et les moteurs brushless (BLDC, moteur sans balais). Si les moteurs à courant continu ont longtemps été utilisés dans la robotique mobile, les moteurs brushless sont désormais privilégiés en raison de leurs nombreux avantages.
L’un des principaux avantages des moteurs brushless par rapport aux moteurs à courant continu réside dans leur durabilité. Les moteurs à courant continu traditionnels utilisent des balais pour transmettre l’énergie au rotor, ce qui entraîne une usure progressive au fil du temps. Ces balais génèrent également de la friction et de la chaleur, ce qui peut affecter les performances du moteur et nécessiter des remplacements réguliers.
Comme les moteurs brushless n’ont pas de balais il n’y a pas d’usure mécanique liée à la friction, ce qui prolonge considérablement la durée de vie du moteur.
Les moteurs brushless sont plus efficaces sur le plan énergétique que les moteurs à courant continu. En raison de l’absence de balais et de la réduction de la friction, les moteurs brushless génèrent moins de chaleur et consomment moins d’énergie pour produire la même quantité de puissance. Cela permet d’obtenir une performance optimale avec une consommation électrique réduite, ce qui est crucial dans des applications robotiques où l’efficacité énergétique est essentielle, notamment pour les robots mobiles alimentés par batterie.
Un moteur brushless est souvent capable de convertir plus efficacement l’énergie fournie par la batterie en mouvement mécanique, ce qui prolonge l’autonomie des robots et permet une utilisation plus prolongée avant de devoir recharger les batteries.
Les moteurs brushless sont souvent associés à des contrôleurs sophistiqués, ce qui permet un contrôle précis de la vitesse et du couple. Grâce à un système de capteurs, tels que les encodeurs magnétique (ex : AS5048) ou les capteurs à effet Hall, il est possible de mesurer en temps réel la position du rotor et d’ajuster les signaux de commande en conséquence. Cela permet un contrôle plus précis du mouvement du robot, ce qui est particulièrement important dans les applications robotiques nécessitant une grande précision, comme les robots chirurgicaux ou des bras d’un robot humanoïdes. De plus, les moteurs brushless sont capables d’offrir un couple élevé sur une large plage de vitesses.
Un autre avantage important des moteurs brushless est leur fonctionnement silencieux. En raison de l’absence de balais et de la réduction de la friction interne, ces moteurs génèrent beaucoup moins de bruit et de vibrations que les moteurs à courant continu.
Les moteurs brushless offrent ainsi un fonctionnement plus fluide et moins perturbant, ce qui améliore l’expérience utilisateur et minimise les interférences dans les systèmes robotiques de précision.
Les moteurs BLDC génèrent généralement moins de bruit électromagnétique que les moteurs à balais, ce qui peut être crucial pour la gestion de certain capteur notamment pour les capteurs magnétique (boussole) qui sont très sensible au bruit.
Les moteurs brushless ont une conception plus compacte et peuvent être plus légers, ce qui est essentiel pour la robotique mobile.
En résumé, les moteurs brushless offrent une combinaison d’efficacité, de durabilité, de contrôle précis et de faible maintenance, ce qui en fait un choix optimal pour la robotique mobile, notamment dans les domaines des robots de service, des drones, des véhicules autonomes et des robots industriels.
Source de cette définition : https://projetromeo.wordpress.com/interaction-physique/gestion-de-la-compliance/
“La compliance est la capacité du robot à adapter la rigidité de ses gestes pour prendre en compte des efforts qui lui sont appliqués. La compliance peut être passive (la mécanique du robot est flexible et se déforme quand on exerce un effort dessus) ou active (la mécanique du robot est rigide mais le logiciel détecte les efforts appliqués dessus et pilote les moteurs pour accompagner ses efforts).”
La compliance apporte de la souplesse, élasticité aux bras robotique pour interagir plus facilement dans un environnement avec les humains ou pour des taches nécessitant de la souplesse pour amortir les efforts sur une pièce mécanique par exemple, ou encore pour manipuler des objets fragiles comme une pomme !
Un robot humanoïde dans une maison par exemple doit être compliant afin d’interagir en toute sécurité avec les humains. Au contraire des robots industriels (bras robotique) qui sont très rigides et donc très dangereux.
Exemple :
Il existe plusieurs solutions techniques afin d’apporter de la compliance à un robot :
FIN
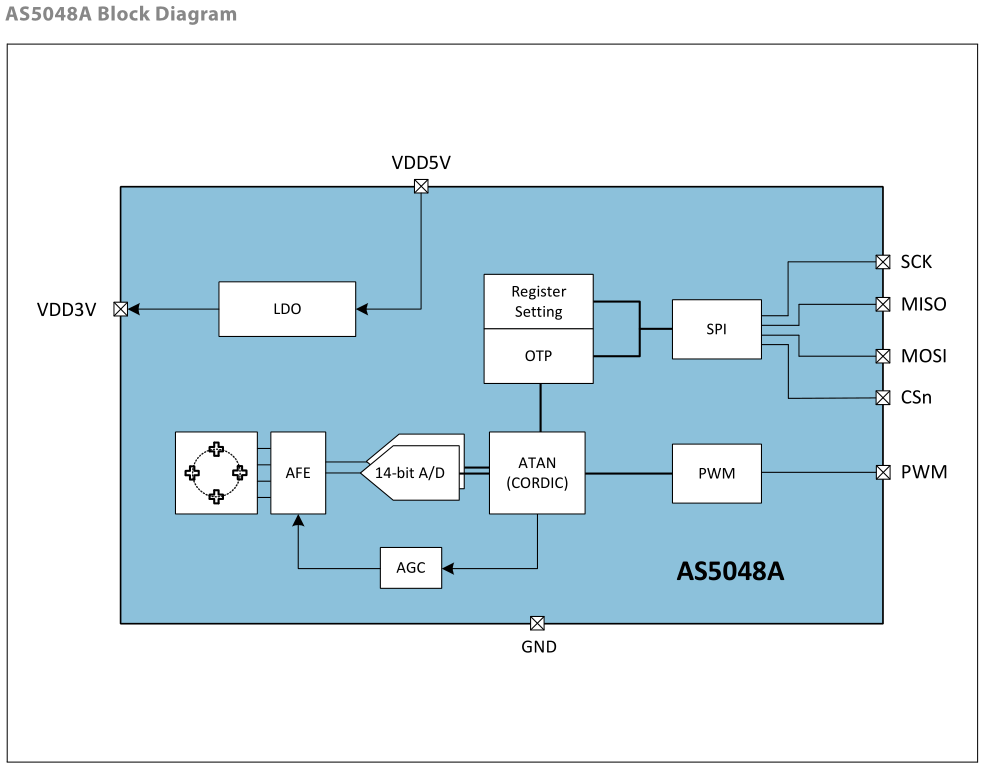
Un exemple d’utilisation d’un encodeur magnétique de référence AS5048 avec la carte Raspberry Pi Pico.
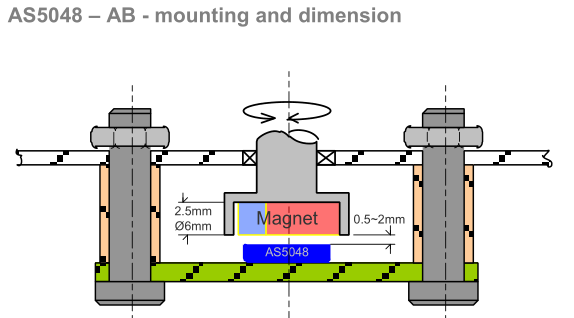
L’encodeur est relié en SPI au Pico via les pins :
[code language=”python”]
#include <SimpleFOC.h>
#include <SPI.h>
#define SPI_MISO 4
#define SPI_MOSI 3
#define SPI_SCK 6
#define SPI_CS 5
MagneticSensorSPI sensor = MagneticSensorSPI(SPI_CS, 14, 0x3FFF);
void setup()
{
SPI.setCS(SPI_CS);
SPI.setSCK(SPI_SCK);
SPI.setRX(SPI_MISO);
SPI.setTX(SPI_MOSI);
SPI.begin();
// initialise magnetic sensor hardware
sensor.init();
}
void loop()
{
sensor.update();
// display the angle and the angular velocity to the terminal
Serial.print(sensor.getAngle());
Serial.print("\t");
Serial.println(sensor.getVelocity());
delay(1000);
}
[/code]
FIN !
Il est disponible en boutique : https://shop.macerobotics.com/