Category: robot
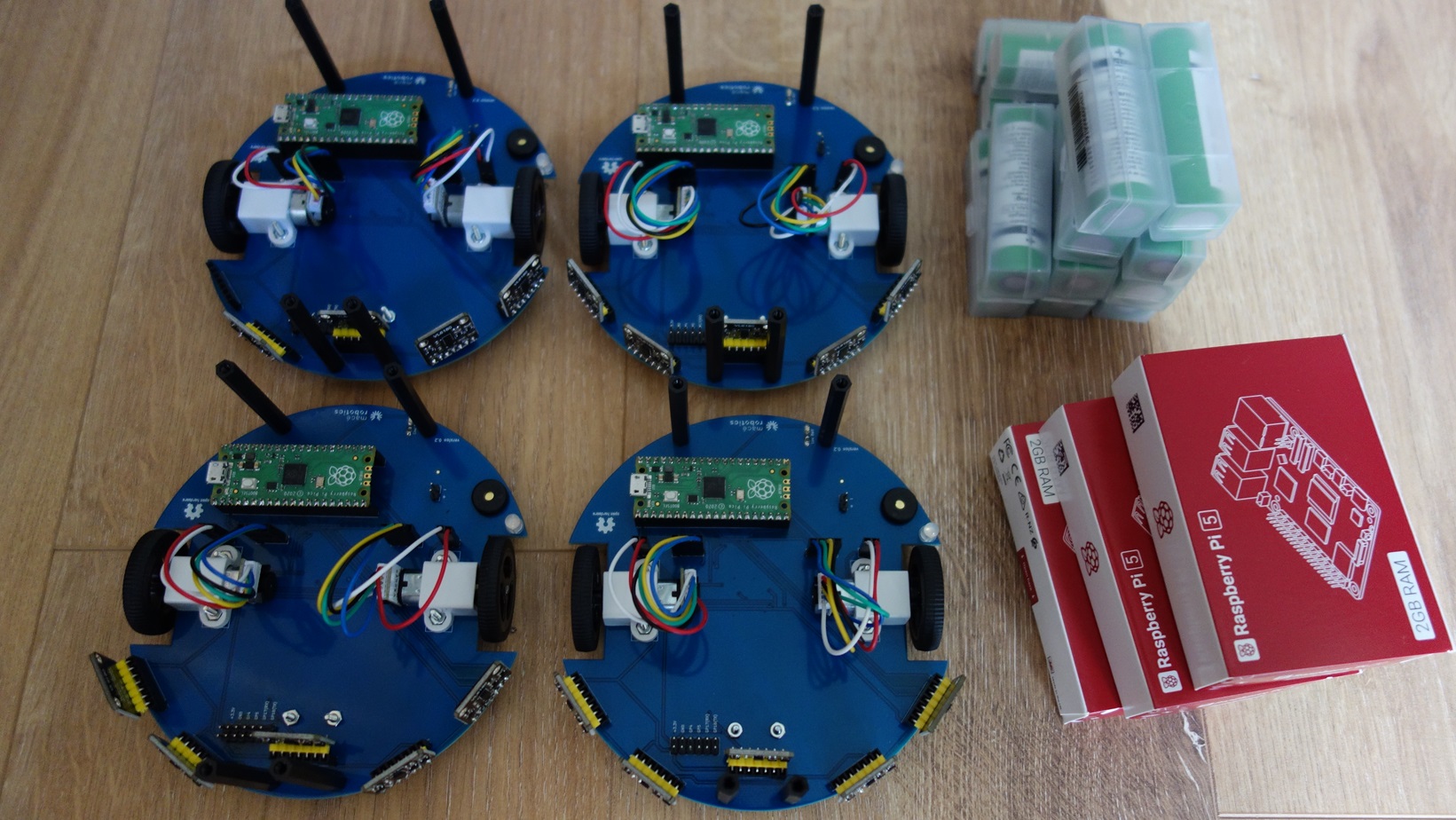
Assemblage de robots MR-25
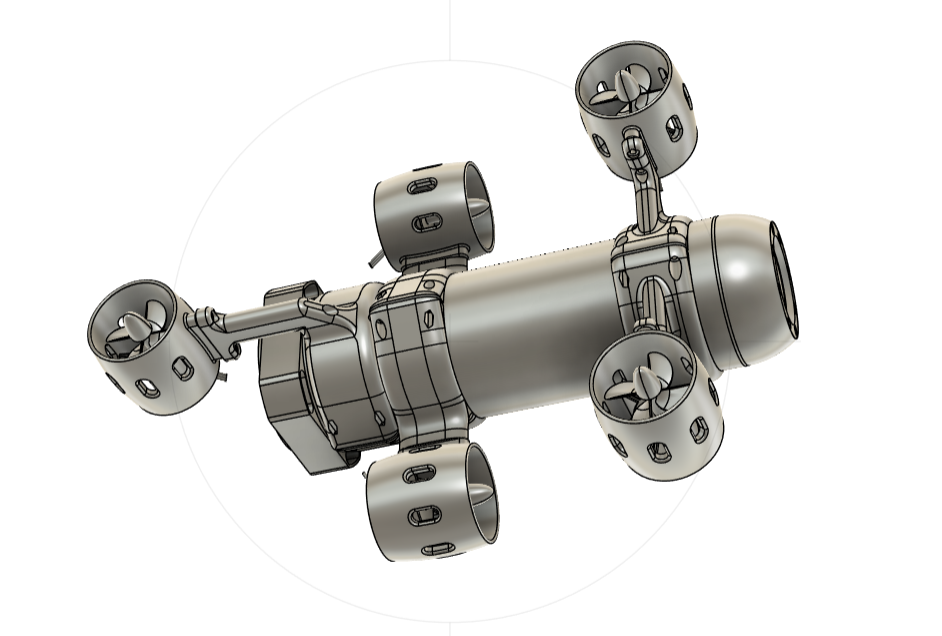
Nouveau robot Open Source en cours de conception !
Un nouveau robot Open Source est en cours de conception, bientôt plus d’informations !
Nicolas
Le robot MR-25 est disponible en boutique !
Bonne nouvelle ! Après plusieurs mois d’attente, le tout nouveau robot mobile basé sur la Raspberry Pi 5 est enfin arrivé en boutique.
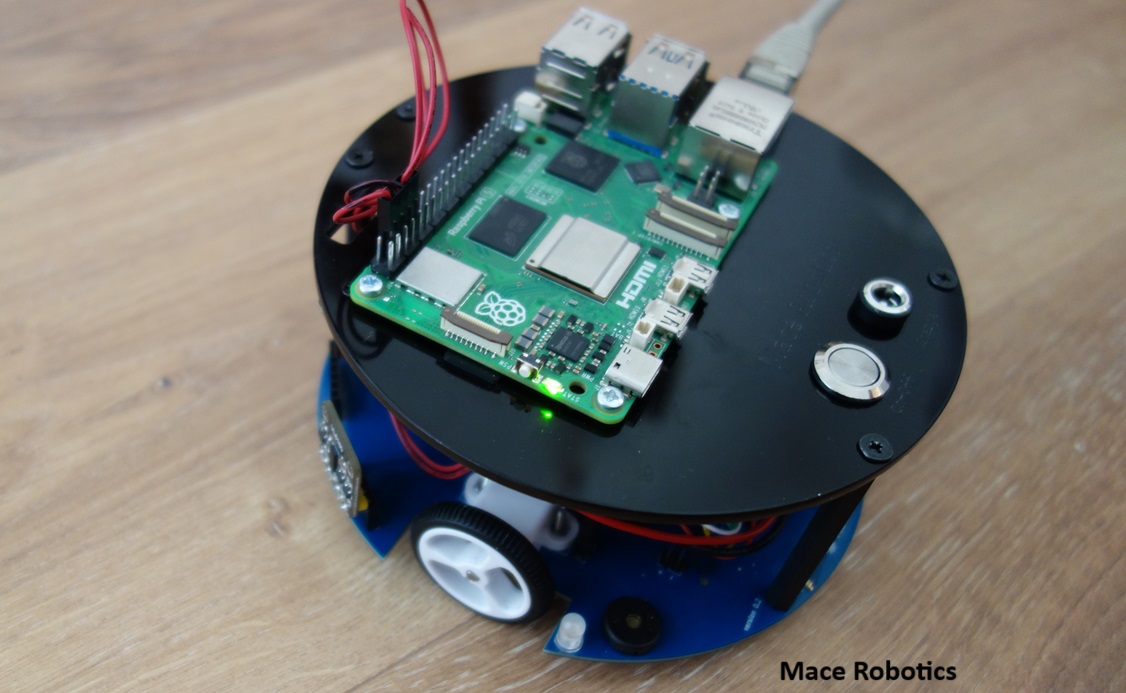
Présentation du robot MR-25
MR-25 est un petit robot mobile basé sur une carte Raspberry Pi. Il est très facile à programmer et personnalisable. Sa petite taille vous permet de facilement le programmer sur une table de bureau.

Ce robot est fabriqué de manière artisanale en Bretagne !
MADE IN FRANCE
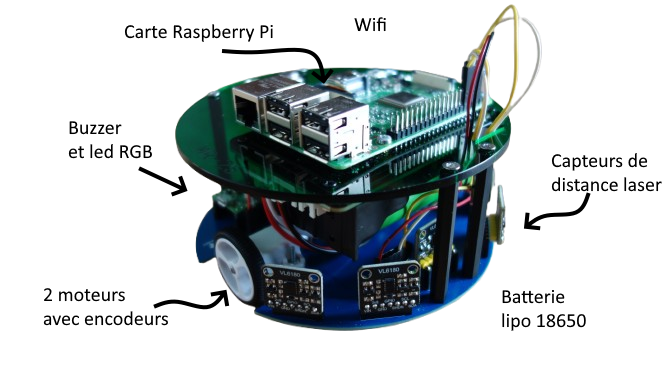
Caractéristiques techniques :
- Dimensions :
- Diamètre de 130 mm
- Hauteur : 85 mm
- Compatible avec la carte Raspberry Pi 3, 4, 2W ou 5
- Une Led RGB
- Coprocesseur : Raspberry Pi Pico
- Un buzzer
- Un capteur de courant, mesure tension batterie
- Deux encodeurs magnétiques
- Deux moteurs à courant continu 100 RPM
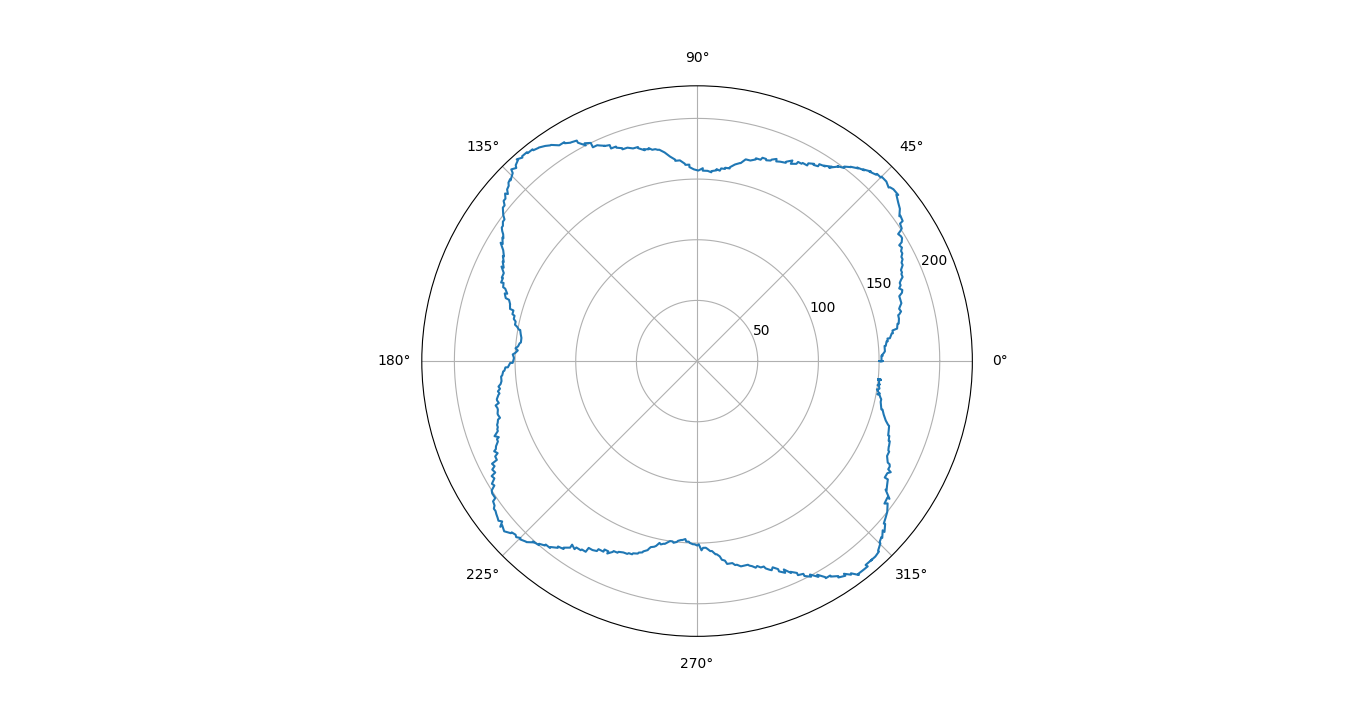
- 5 capteurs de distances Time-of-Flight VL6180X.
- Batterie : 3 accumulateurs 18650 lithuim
- Un bouton on/off
- Un connecteur de rechargement de la batterie
Exemple de création de carte avec les capteurs :
Robot programmable :
Le robot MR-25 est programmable en langage Python3 :
![]()
Traitement d’images
Le robot MR-25 peut être équipé d’une caméra Pi pour faire du traitement d’images avec Open Cv.
![]()
Documentation du robot MR-25
Licences Hardware et Software:
- Logiciel : MIT Licence
- Matériel : CC-BY-SA
Super robot Open source
Nouveau robot Open Source MR-25
Un nouveau robot mobile basé sur une carte Raspberry Pi sera disponible en septembre 2025 :
-> Robot Open Source
-> Basé sur une carte Raspberry Pi 5 ou 3
-> Buzzer, leds RGB
-> Batterie rechargable
-> 5 capteurs de distance laser
-> Moteurs avec encodeurs
-> µC : Raspberry Pico
-> 130 mm de diamètre
Le robot MR-25 en cours de tests :
A bientôt !
Nicolas
Bientôt un nouveau robot …
Un nouveau robot est en cours de conception :
- basé sur une carte Raspberry Pi 5 ou zero 2W
- 2 roues
- 2 encodeurs magnétiques
- 5 capteurs ToF
- Microcontrôleur : Raspberry Pi Pico
- Open source (Hardware + software)
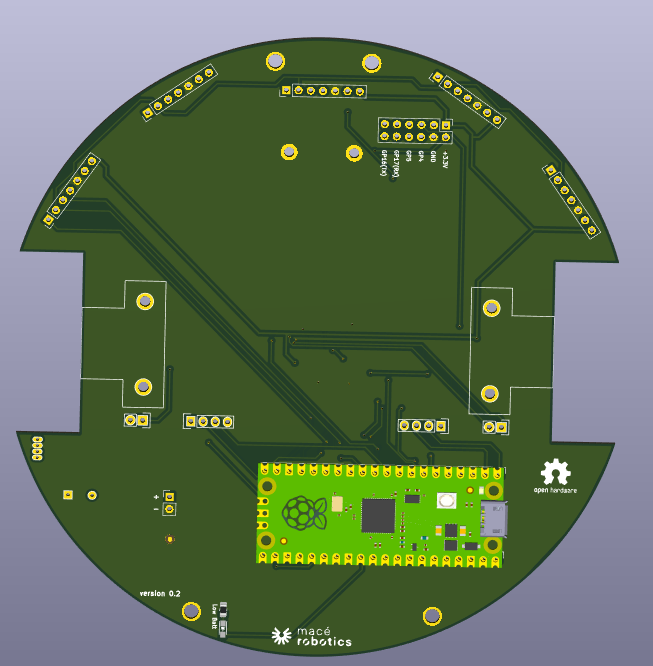
Châssis :
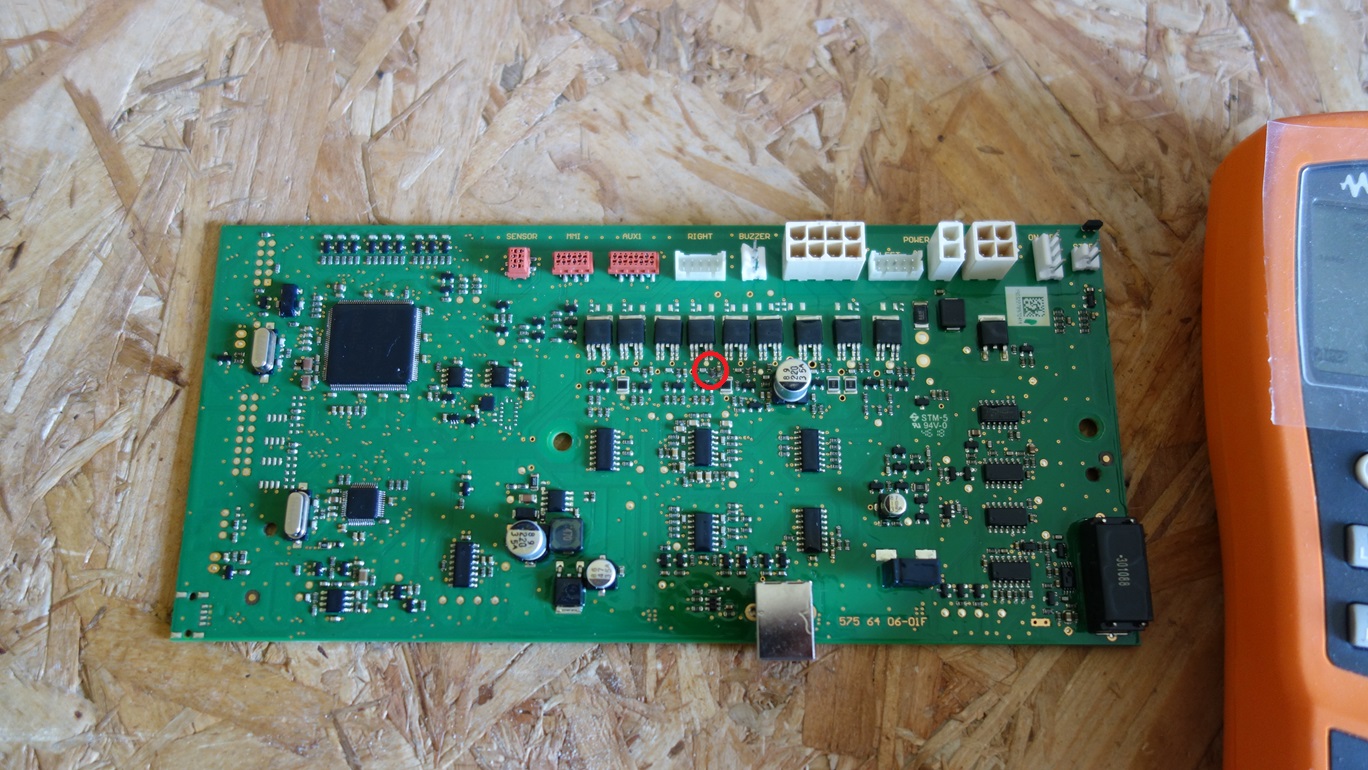
Réparation carte robot tondeuse Husqvarna
Réparation d’une carte de robot tondeuse Husqvarna :
- Modification de la résistance de la grille Mosfet de 430 Ohm sur le pont triphasé des moteurs brushless.
Mace Robotics sponsor de Fipatech ENSTA
Mace Robotics est sponsor de l’équipe de robotique des apprentis ingénieurs de l’ENSTA Bretagne pour la participation à la coupe de France de robotique. Les participant·e·s doivent concevoir un robot autonome, ce concours est du 28 au 31 mars à la Roche sur Yon.

Site web de l’équipe :