Category: Raspberry Pico
Nouveau robot Open Source en cours de conception !
Un nouveau robot Open Source est en cours de conception, bientôt plus d’informations !
Nicolas
Présentation du robot MR-25
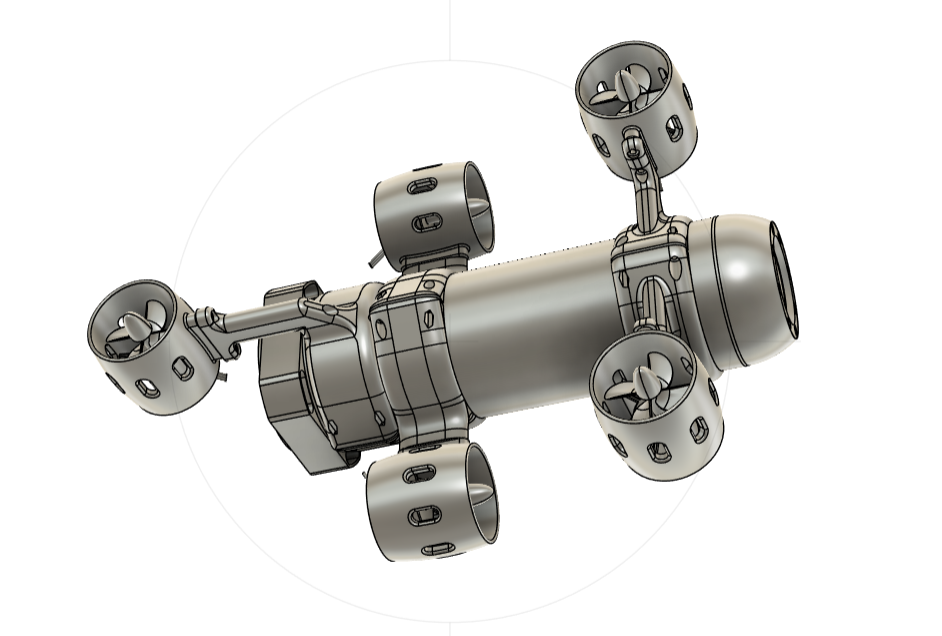
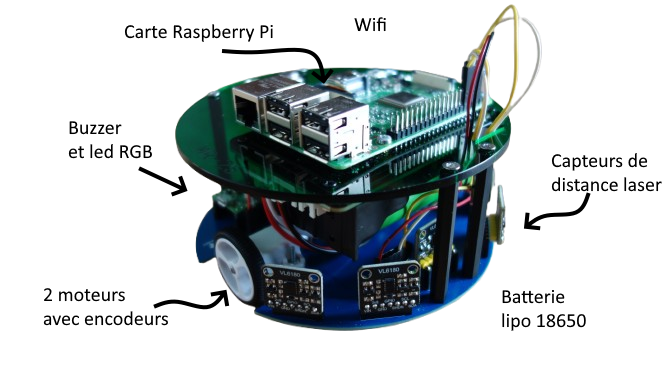
MR-25 est un petit robot mobile basé sur une carte Raspberry Pi. Il est très facile à programmer et personnalisable. Sa petite taille vous permet de facilement le programmer sur une table de bureau.

Ce robot est fabriqué de manière artisanale en Bretagne !
MADE IN FRANCE
Caractéristiques techniques :
- Dimensions :
- Diamètre de 130 mm
- Hauteur : 85 mm
- Compatible avec la carte Raspberry Pi 3, 4, 2W ou 5
- Une Led RGB
- Coprocesseur : Raspberry Pi Pico
- Un buzzer
- Un capteur de courant, mesure tension batterie
- Deux encodeurs magnétiques
- Deux moteurs à courant continu 100 RPM
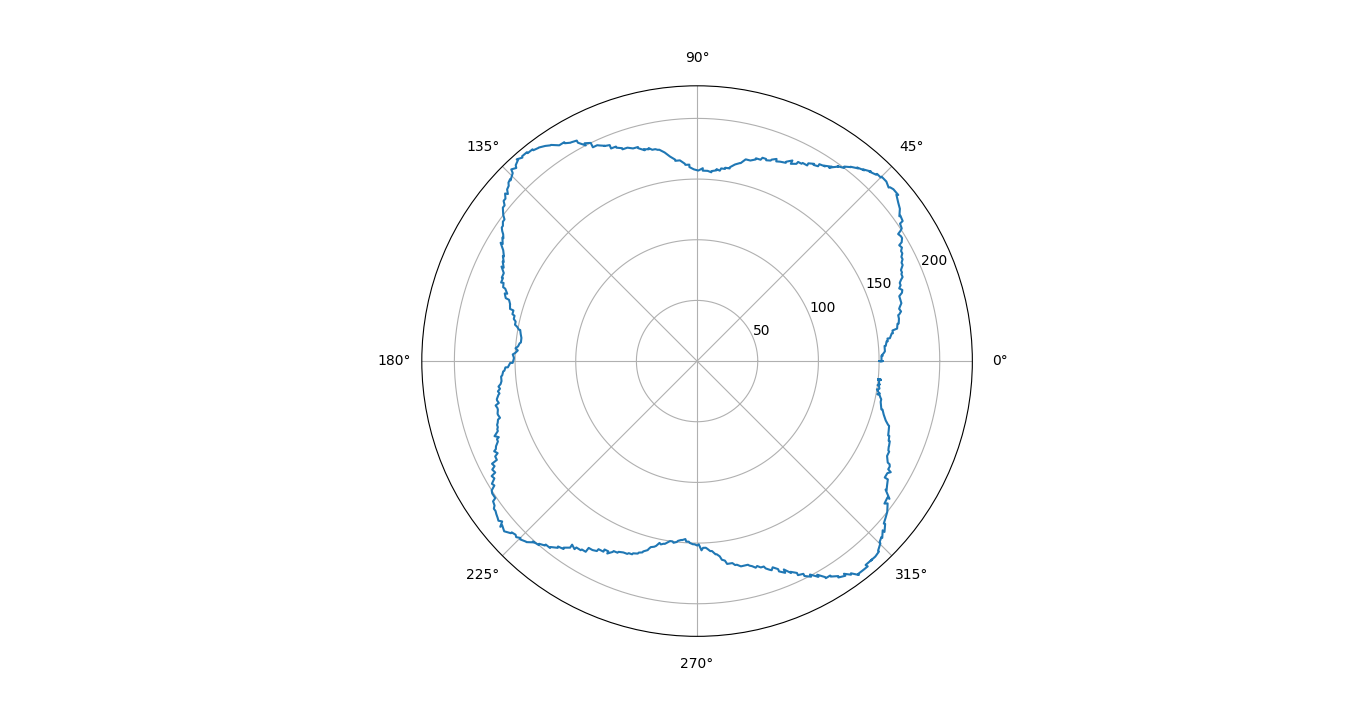
- 5 capteurs de distances Time-of-Flight VL6180X.
- Batterie : 3 accumulateurs 18650 lithuim
- Un bouton on/off
- Un connecteur de rechargement de la batterie
Exemple de création de carte avec les capteurs :
Robot programmable :
Le robot MR-25 est programmable en langage Python3 :
![]()
Traitement d’images
Le robot MR-25 peut être équipé d’une caméra Pi pour faire du traitement d’images avec Open Cv.
![]()
Documentation du robot MR-25
Licences Hardware et Software:
- Logiciel : MIT Licence
- Matériel : CC-BY-SA
Nouveau robot Raspberry Pi en cours …
Un nouveau robot open source en phase de test :
-
Un robot innovant et entièrement open source est actuellement en cours de développement, basé sur la plateforme Raspberry Pi :
-
Nom du robot : MR-25
-
Microcontrôleur embarqué : Raspberry Pi Pico
-
Compatibilité : Raspberry Pi 5, 4, Zero W, etc.
-
Alimentation : Module UPS 18650 – 5V / 3A
Le MR-25 a été conçu pour offrir une base robuste et évolutive pour des projets en robotique mobile, mêlant puissance de calcul et modularité.
-
Bientôt un nouveau robot mobile !
Bientôt, une nouvelle version du robot MRPiZ sera disponible, il sera basé sur une carte Raspberry Pi 5.
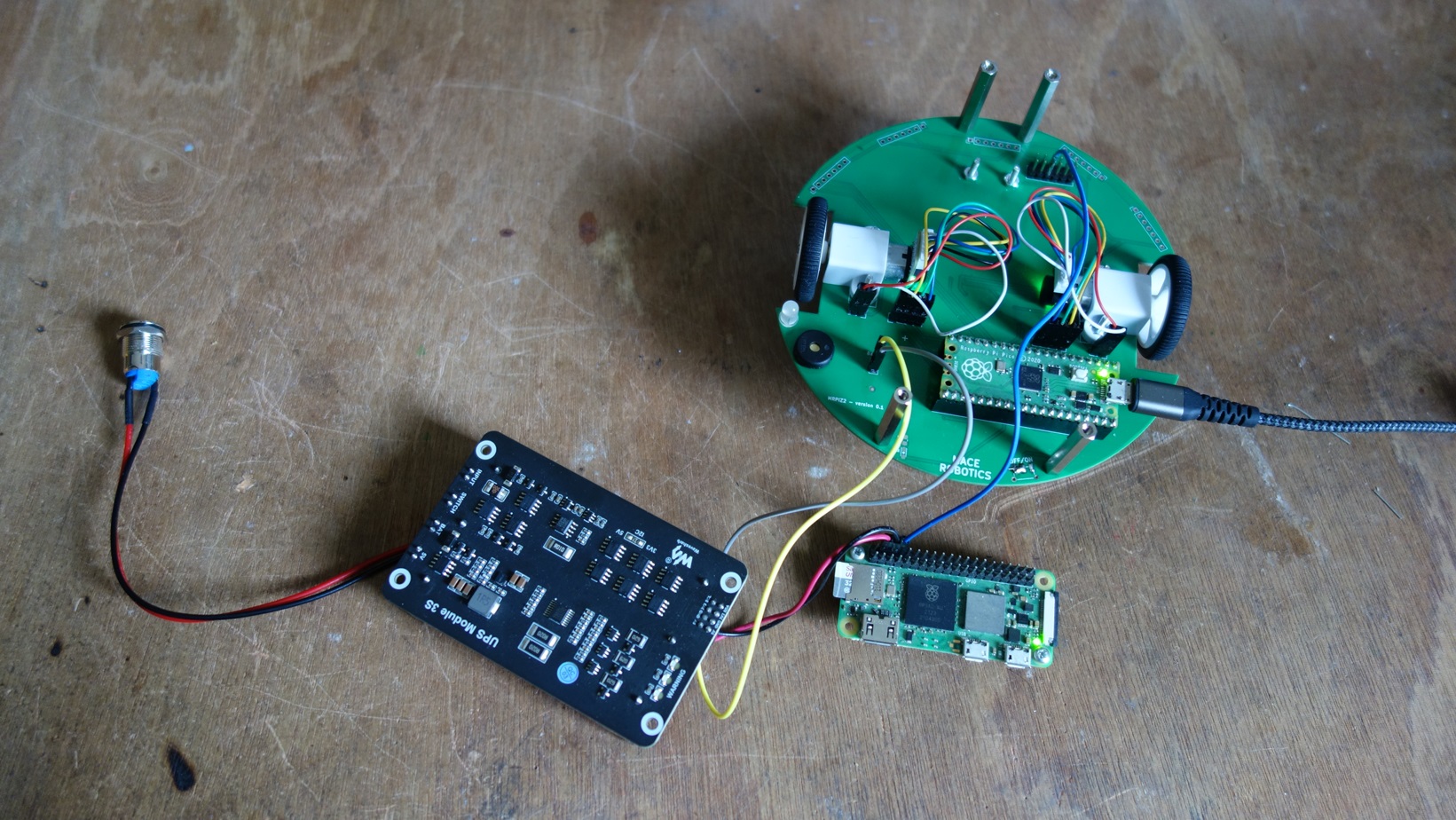
Test de la carte Raspberry Pi 5 avec un UPS 3S – 5V – 3A :
- UPS waveshare : permet d’alimenter la carte Raspberry Pi avec des accumulateurs 18650.
- Raspberry Pi 5
- 3×18650 LiPo

Conception d’une carte de contrôle de moteur brushless
Conception en cours d’une carte électronique avec le logiciel Kicad. Cette carte permet de contrôler un moteur brushless avec la librairie SimpleFOC :
- Tension d’alimentation max : 65 Volts
- Raspberry Pi Pico (Arm Cortex)
- Driver brushless DRV8313
- Capteur encodeur intégré (AS5047D)
- Capteur de courant (INA180)

Contrôle de votre Raspberry Pi Pico avec un terminal serie
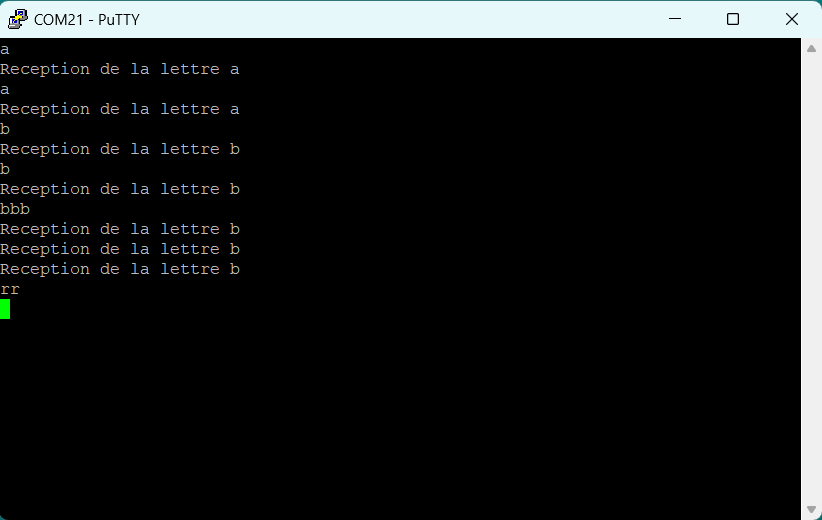
Un exemple de programme pour envoyer des commandes à la carte Raspberry Pi Pico a partir de votre PC en utlisant la liaison micro-usb :
import select
import sys
import time
import machine
poll_obj = select.poll()
poll_obj.register(sys.stdin,1)
while True:
# Si data de disponible
if poll_obj.poll(0):
# Lecture des données
data_reception = sys.stdin.read(1)
if data_reception=='a':
print ("Reception de la lettre a" )
if data_reception=='b':
print ("Reception de la lettre b" )
time.sleep(0.1)
Exemple avec putty :
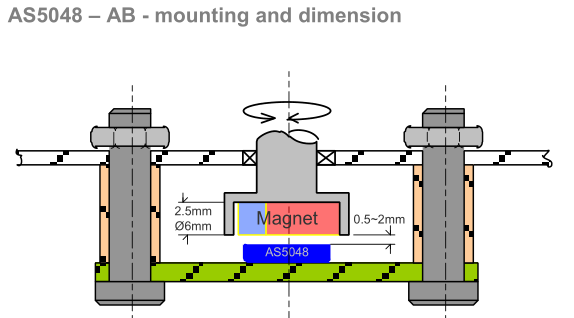
Utilisation d’un encodeur magnétique AS5048 avec la Raspberry Pi Pico
Un exemple d’utilisation d’un encodeur magnétique de référence AS5048 avec la carte Raspberry Pi Pico.
- Utilisation de la librairie simpleFOC
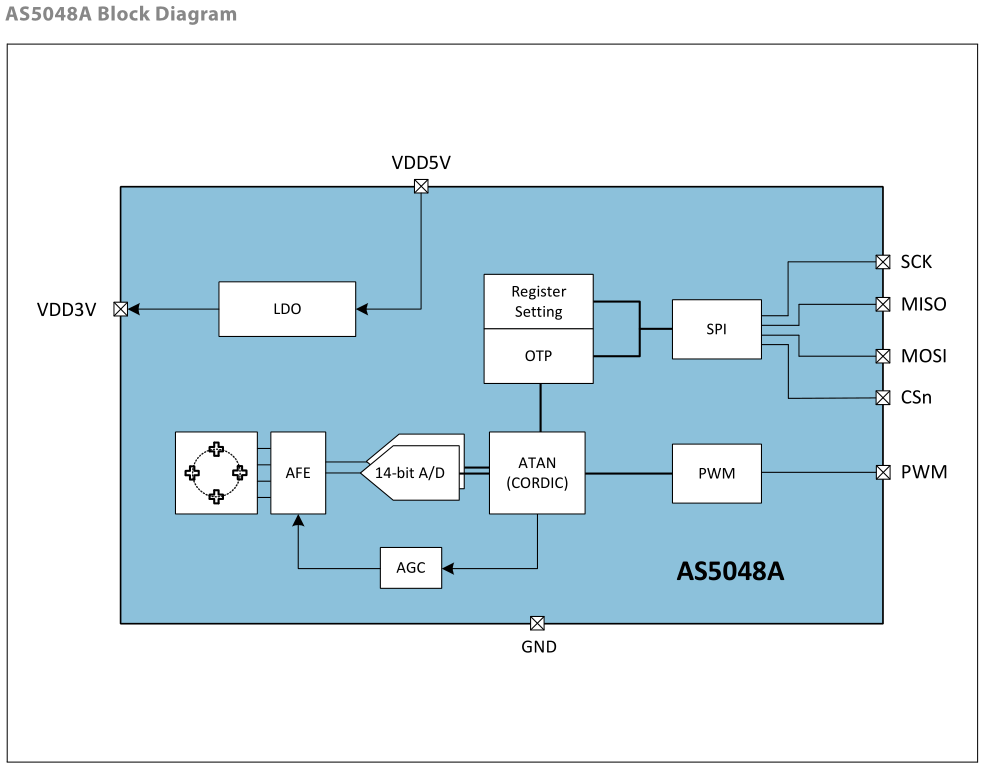
L’encodeur est relié en SPI au Pico via les pins :
- GPIO4 => MISO
- GPIO3 => MOSI
- GPIO6 => SCK
- GPIO5 => CS
Exemple de lecture
[code language=”python”]
#include <SimpleFOC.h>
#include <SPI.h>
#define SPI_MISO 4
#define SPI_MOSI 3
#define SPI_SCK 6
#define SPI_CS 5
MagneticSensorSPI sensor = MagneticSensorSPI(SPI_CS, 14, 0x3FFF);
void setup()
{
SPI.setCS(SPI_CS);
SPI.setSCK(SPI_SCK);
SPI.setRX(SPI_MISO);
SPI.setTX(SPI_MOSI);
SPI.begin();
// initialise magnetic sensor hardware
sensor.init();
}
void loop()
{
sensor.update();
// display the angle and the angular velocity to the terminal
Serial.print(sensor.getAngle());
Serial.print("\t");
Serial.println(sensor.getVelocity());
delay(1000);
}
[/code]
FIN !
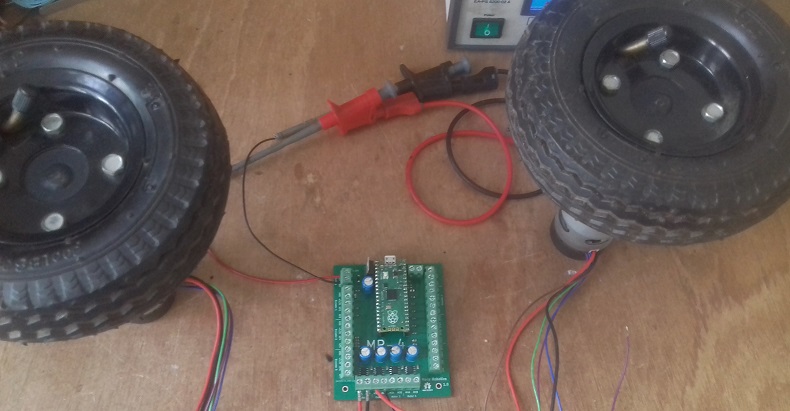
Contrôle de 2 moteurs avec la carte MR-4
Exemple d’application de contrôle de 2 moteurs à courant continu avec la carte MR-4.
Les 2 moteurs sont connectés à la carte MR-4, une alimentation alimente la carte avec une tension de 24 Volts.
 Le programme en micropython :
Le programme en micropython :
import time import motor # initialisation motor1 = motor.Motor(11,10) motor2 = motor.Motor(13,12) # contrôles des moteurs motor1.control(1,30) #avec une vitesse de 30 %, direction 1 motor2.control(0,40) #avec une vitesse de 40 %, direction 0 # end of file
La carte MR-4 est disponible en boutique :