Contrôle en boucle ouverte d’un moteur brushless avec la carte MR4
Category: MR-4
TUTO, contrôles des sorties moteurs avec la carte MR-4
Ce tutoriel présente le contrôle des 4 sorties moteurs de la carte MR-4.
La fonction pour le contrôle de la sortie moteur n°1 est :
MR4.motor1Control(direction, vitesse)
Avec :
• direction : valeur entière de 0 ou 1
• vitesse : de 0 à 100 %
La fonction pour le contrôle de la sortie moteur n°2 est :
MR4.motor2Control(direction, vitesse)
Exemple n°1 :
Contrôle des 4 sorties moteurs (direction 0) pendant 3 secondes et dans l’autre direction pendant 3 secondes.
import time import MR4 while 1: # direction 0 MR4.motor1Control(0, 50) # vitesse à 50% MR4.motor2Control(0, 50) MR4.motor3Control(0, 50) MR4.motor4Control(0, 50) time.sleep(3) # direction 1 MR4.motor1Control(1, 30) # vitesse à 30% MR4.motor2Control(1, 70) # vitesse à 70% MR4.motor3Control(1, 50) MR4.motor4Control(1, 80) time.sleep(3) # end of file
Exemple n°2 Brake :
Freinage du moteur après 10 secondes :
import time
import MR4
print("start")
# contrôle sortie 1
MR4.motor1Control(1, 50)
time.sleep(10)
MR4.motor1Brake()
print("end")
# end of file
Exemple n°3 Stop:
Stop du moteur après 5 secondes :
import time
import MR4
print("start")
# contrôle sortie 1
MR4.motor1Control(1, 50)
time.sleep(5)
MR4.motor1Stop()
print("end")
# end of file
Fin du tuto !
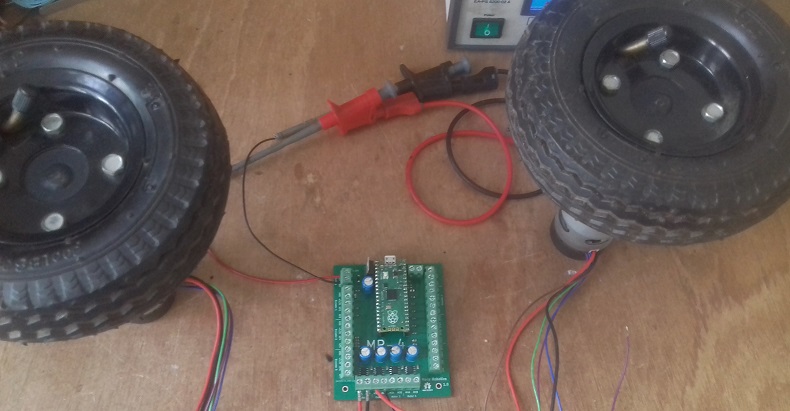
Contrôle de 2 moteurs avec la carte MR-4
Exemple d’application de contrôle de 2 moteurs à courant continu avec la carte MR-4.
Les 2 moteurs sont connectés à la carte MR-4, une alimentation alimente la carte avec une tension de 24 Volts.
 Le programme en micropython :
Le programme en micropython :
import time import motor # initialisation motor1 = motor.Motor(11,10) motor2 = motor.Motor(13,12) # contrôles des moteurs motor1.control(1,30) #avec une vitesse de 30 %, direction 1 motor2.control(0,40) #avec une vitesse de 40 %, direction 0 # end of file
La carte MR-4 est disponible en boutique :