Category: robot
Présentation du robot raspberry pi – MRPiZ
Une vidéo de présentation du robot MRPiZ :
Hybrid Leg-Wheel Robot
https://www.facebook.com/MaceRobotics/videos/vb.1071880259509268/721286768734468/?type=2&theater
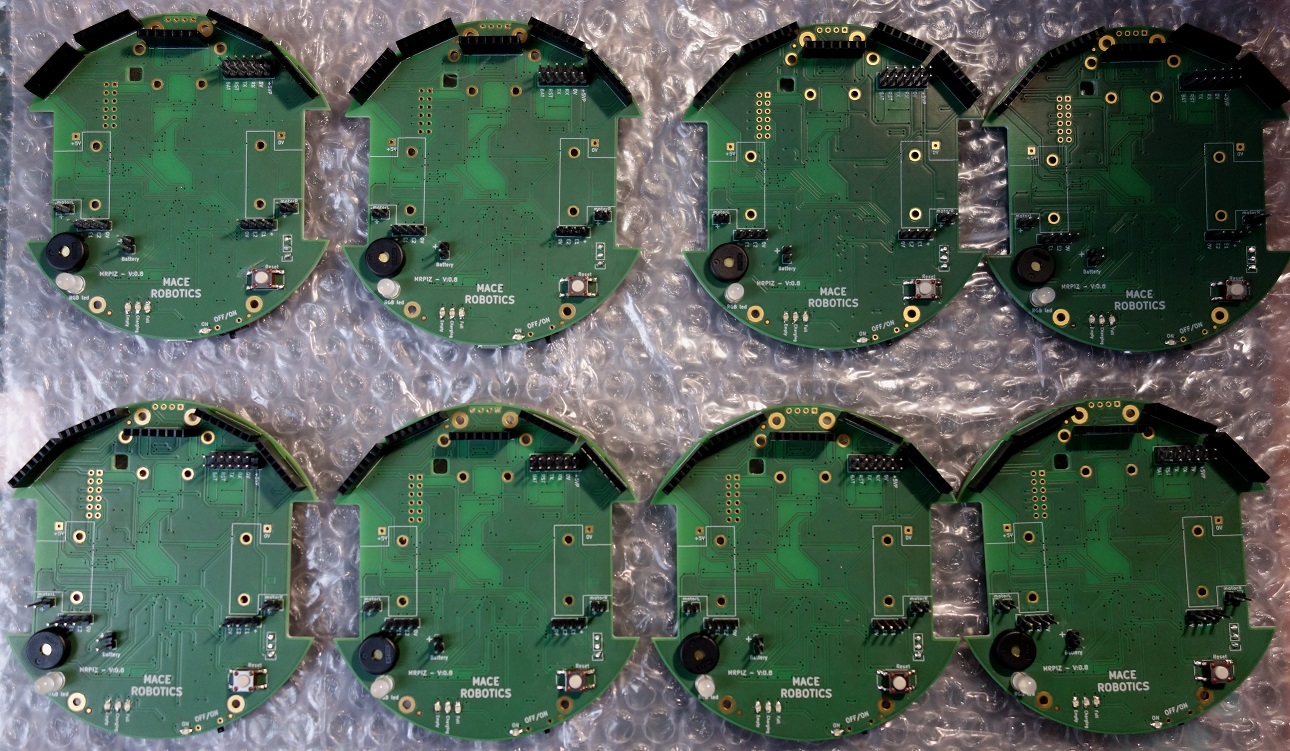
Nouvelle cartes électroniques
Le robot MRPiZ en langage C
Un tutoriel pour programmer le robot mobile MRPiZ en langage C.
Lien pour l’API C : https://github.com/macerobotics/MRPiZ/tree/master/Software/C
Les fichiers doivent être placer dans des répertoires:
- les fichiers .c dans le répertoire sources
- les fichiers .h dans le répertoire header
Exemple n°1 : simple déplacement
Un exemple pour déplacer le robot MRPiZ:
Compilation du fichier :
Exécution du programme :
Exemple n°2 : lecture des capteurs laser
Un exemple pour la lecture des 3 capteurs ToF du robot :
Exemple n°3 : lecture des encodeurs
Un exemple pour la lecture des 2 encodeurs du robot.
Fin du tuto !
Borvo new video
Cinématique inverse avec python, Tinyik
Tinyik, une bibliothèque en langage python pour résoudre les calculs de cinématique inverse, bien utile en robotique :
Installation de Tinyik
Installation de la bibliothèque avec pip:
$ pip install tinyik
Sources :
Borvo A1 – Tech’inn Vitré – quadruped robot
Une vidéo du robot prototype quadrupède BORVO au salon Tech’inn Vitré :
- Teensys 3.5
- 8 servomoteurs
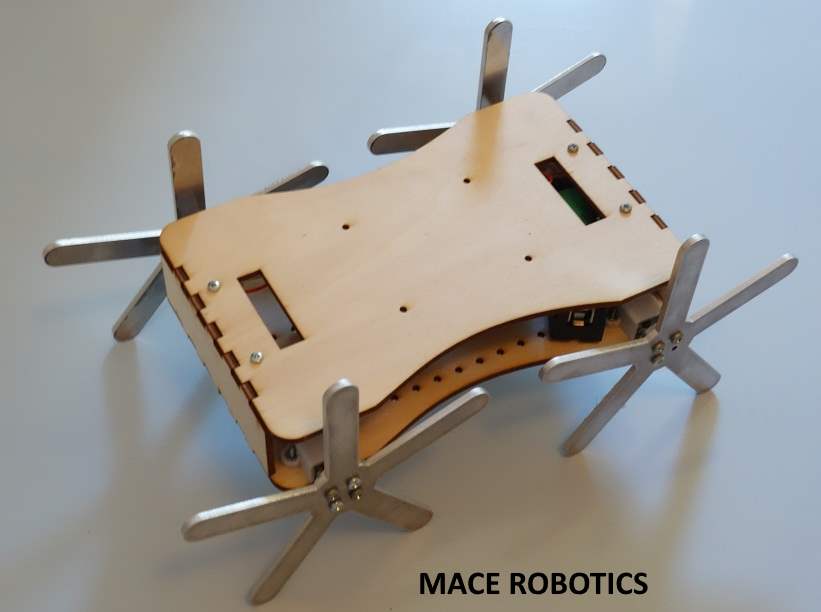
New design, quadruped – BORVO
Mace Robotics presents the new design for the BORVO quadruped robot, with more bio-inspired legs:

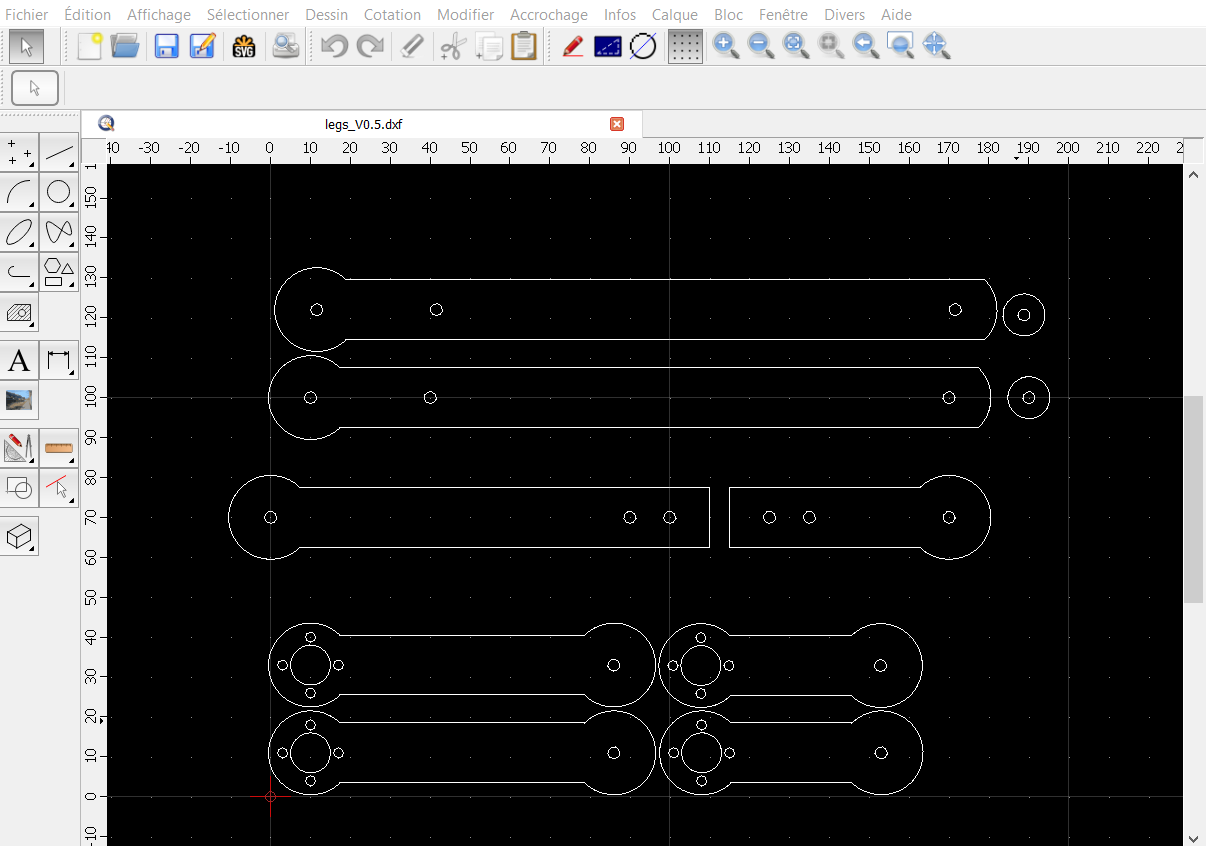
I use 2D CAD software (QCAD) for drawing the legs:
The robot uses 8 JX PDI-6221MG servo motors with a torque of 20 kg. Every leg is equipped with two servomotors with in parallel operation.
I use FreeCAD software to check the reverse kinematics calculations of the legs.

The robot uses a Teensys 3.5 microcontroller to program with Arduino IDE. For the moment, no inertial sensor or foot contacting sensors are used.
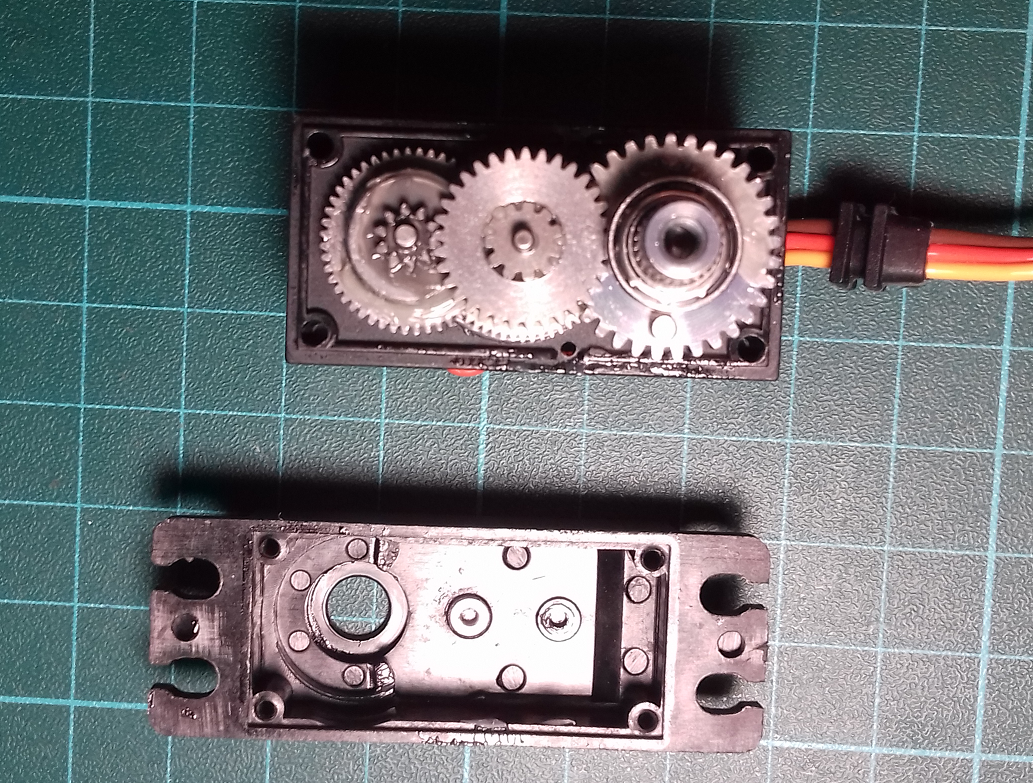
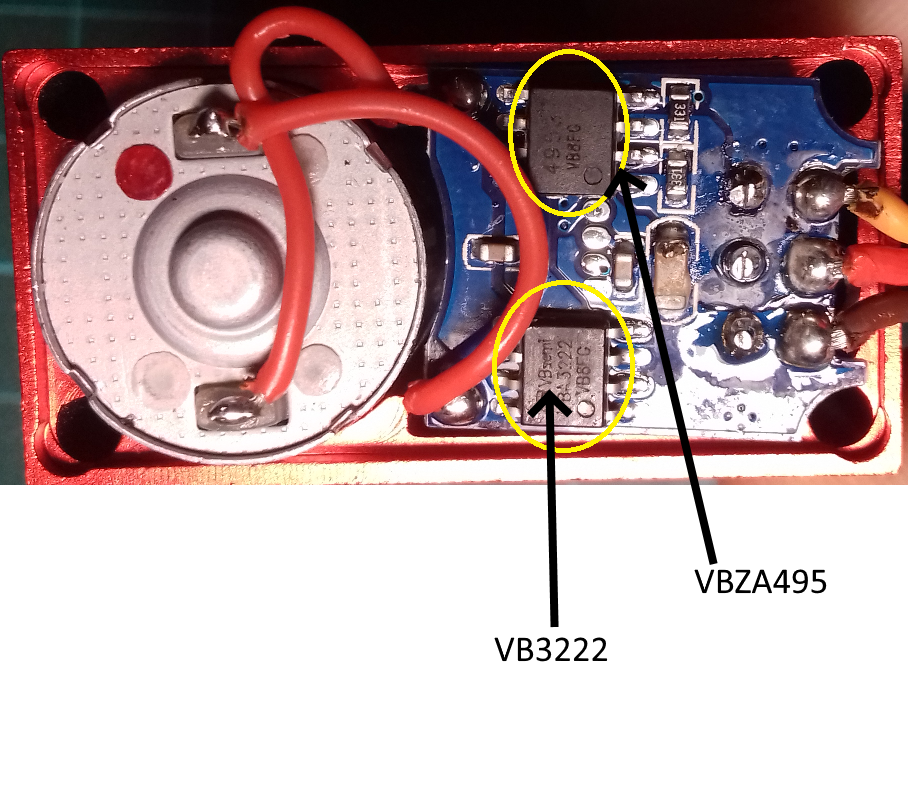
Inside PDI-6221MG servomotor
Inside the PDI-6221MG servomotor :
Microcontrollers:
- STM8S003F3
- 8-bit MCU with 8 Kbytes Flash, 16 MHz CPU, integrated EEPROM
- 16 MHz
H-Bridge :
Dual N-Mosfet : VB3222 (www.VBsemi.com)
-
-
- VDS max : 20V
- ID max : 4.8A
-
Dual P-Mosfet : VBZA495 (www.VBsemi.com)
-
- VDS max : -30V
- ID max : -7.3A
Metal gear :