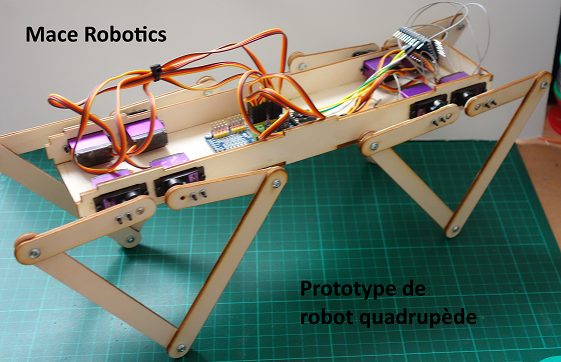
26 June 2019 Robot quadrupède version : 0.1 µC : Teensys 3.5 Contrôle servomoteur : Driver I2C pour 16 servomoteurs IMU : CMPS12 Servomoteurs : MG91 Matériaux : peuplier de 3 mm découper avec une découpe laser