Category: robot
IA – Neurone artificiel avec le robot MR25 (Partie 2)
Présentation
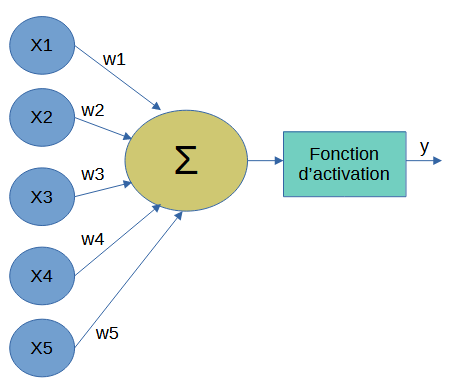
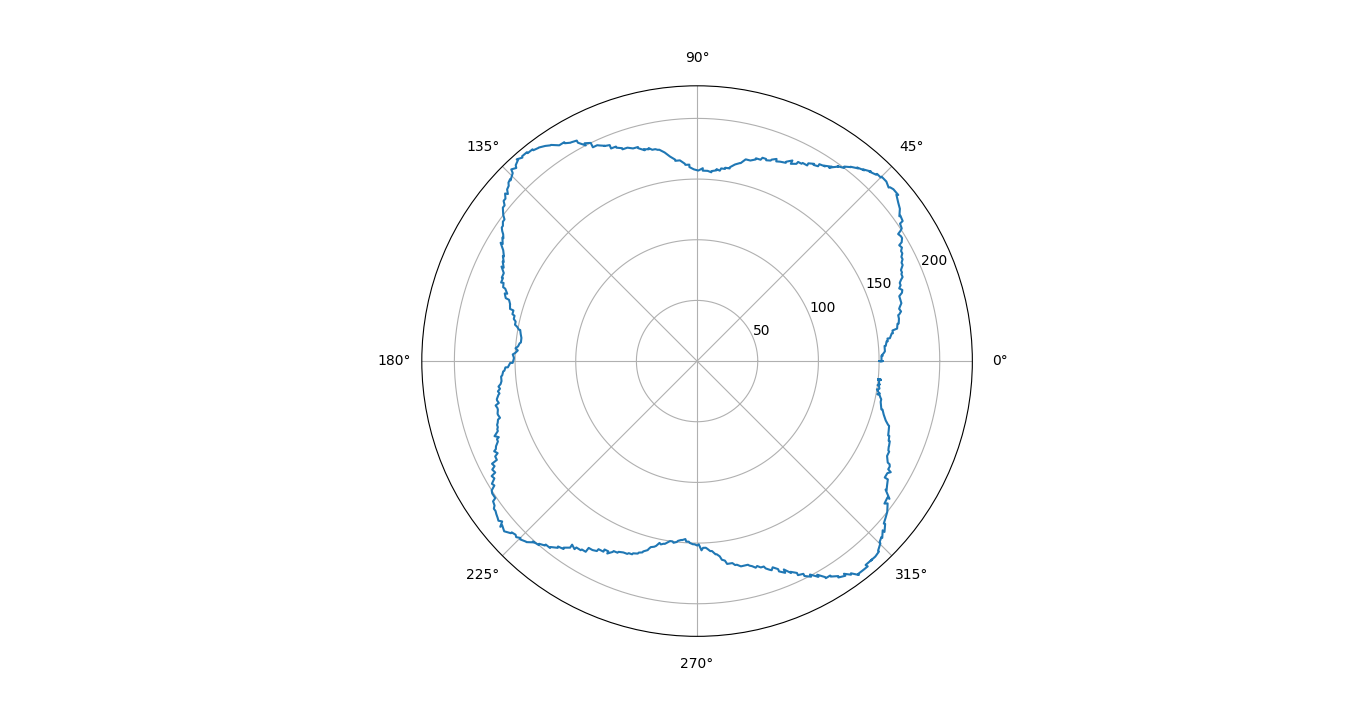
Dans cet article nous allons apprendre au robot MR25 à éviter les obstacles en utilisant un neurone perception avec 5 entrées. Avec les 5 capteurs du robot, il est préférable de ne plus simplement décider avance / stop comme dans la partie n°1, mais aussi de choisir une direction lorsque l’on détecte un obstacle.
Voici l’idée :
- Capteurs 1 et 2 → surveillent la gauche.
- Capteur 3 → surveille le centre.
- Capteurs 4 et 5 → surveillent la droite.
- Distance proche de 0 mm → obstacle très proche.
- Distance proche de 250 mm → espace libre.
On peut entraîner un perceptron à 5 entrées qui décide si le robot peut avancer, puis utiliser les capteurs pour déterminer le sens de rotation lorsqu’il ne peut pas avancer.
Le neurone perceptron simple est un modèle de prédiction linéaire. Il est nécessaire d’utiliser plusieurs couches (réseau) pour résoudre des problèmes plus complexes.
Fin !
MR25 play music
Le robot MR25 joue Star Wars :
Voici le programme en langage Python3 :
Le robot MR25 est disponible en boutique !
A bientôt,
Nicolas
Vidéo de présentation du robot MR-25
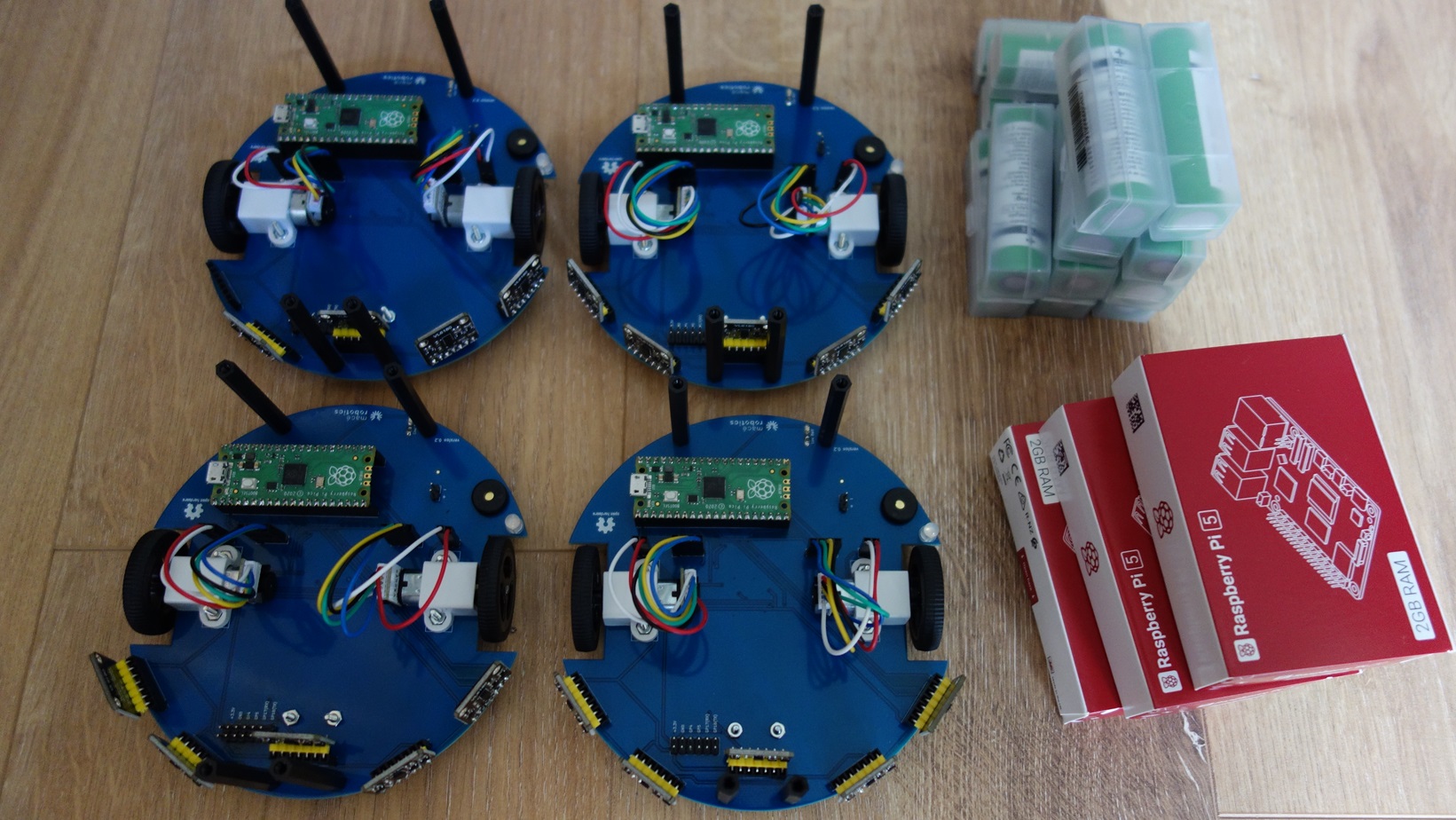
Assemblage de robots MR-25
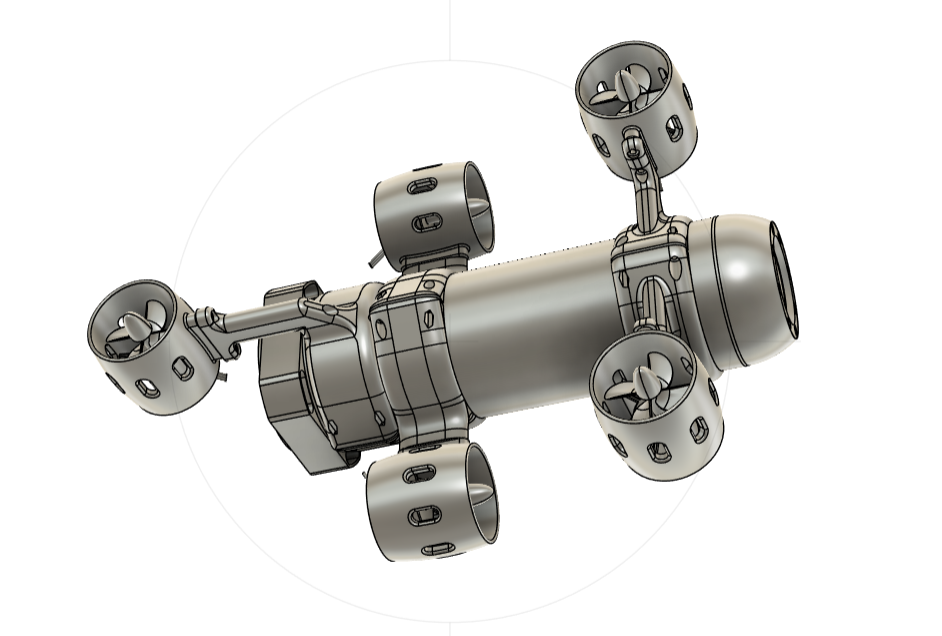
Nouveau robot Open Source en cours de conception !
Un nouveau robot Open Source est en cours de conception, bientôt plus d’informations !
Nicolas
Le robot MR-25 est disponible en boutique !
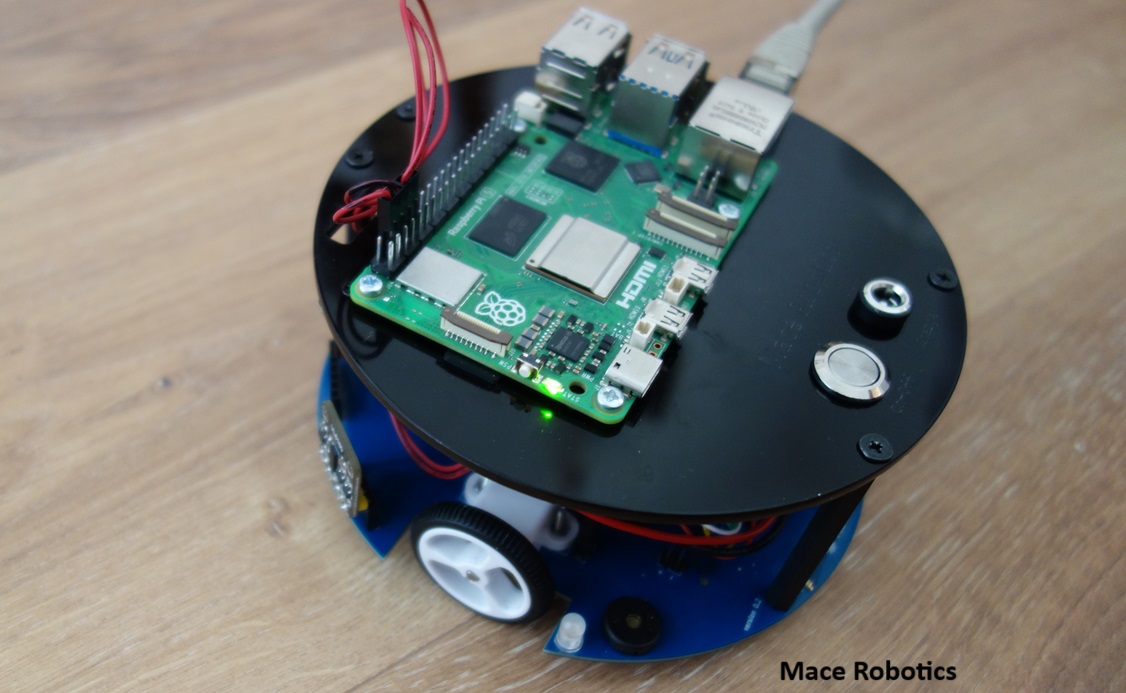
Bonne nouvelle ! Après plusieurs mois d’attente, le tout nouveau robot mobile basé sur la Raspberry Pi 5 est enfin arrivé en boutique.
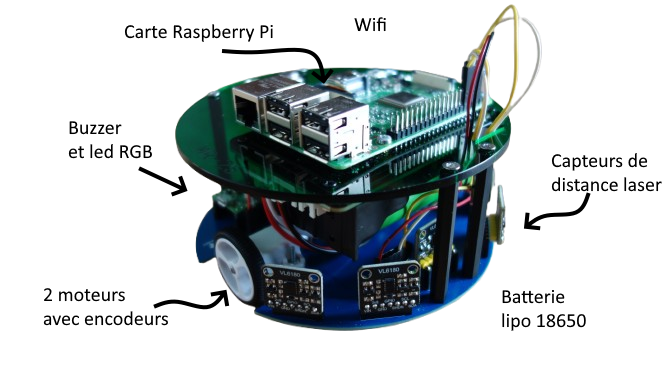
Présentation du robot MR-25
MR-25 est un petit robot mobile basé sur une carte Raspberry Pi. Il est très facile à programmer et personnalisable. Sa petite taille vous permet de facilement le programmer sur une table de bureau.

Ce robot est fabriqué de manière artisanale en Bretagne !
MADE IN FRANCE
Caractéristiques techniques :
- Dimensions :
- Diamètre de 130 mm
- Hauteur : 85 mm
- Compatible avec la carte Raspberry Pi 3, 4, 2W ou 5
- Une Led RGB
- Coprocesseur : Raspberry Pi Pico
- Un buzzer
- Un capteur de courant, mesure tension batterie
- Deux encodeurs magnétiques
- Deux moteurs à courant continu 100 RPM
- 5 capteurs de distances Time-of-Flight VL6180X.
- Batterie : 3 accumulateurs 18650 lithuim
- Un bouton on/off
- Un connecteur de rechargement de la batterie
Exemple de création de carte avec les capteurs :
Robot programmable :
Le robot MR-25 est programmable en langage Python3 :
![]()
Traitement d’images
Le robot MR-25 peut être équipé d’une caméra Pi pour faire du traitement d’images avec Open Cv.
![]()
Documentation du robot MR-25
Licences Hardware et Software:
- Logiciel : MIT Licence
- Matériel : CC-BY-SA
Super robot Open source
Nouveau robot Open Source MR-25
Un nouveau robot mobile basé sur une carte Raspberry Pi sera disponible en septembre 2025 :
-> Robot Open Source
-> Basé sur une carte Raspberry Pi 5 ou 3
-> Buzzer, leds RGB
-> Batterie rechargable
-> 5 capteurs de distance laser
-> Moteurs avec encodeurs
-> µC : Raspberry Pico
-> 130 mm de diamètre
Le robot MR-25 en cours de tests :
A bientôt !
Nicolas