Category: Raspberry Pi
MR25 play music
Le robot MR25 joue Star Wars :
Voici le programme en langage Python3 :
Le robot MR25 est disponible en boutique !
A bientôt,
Nicolas
Vidéo de présentation du robot MR-25
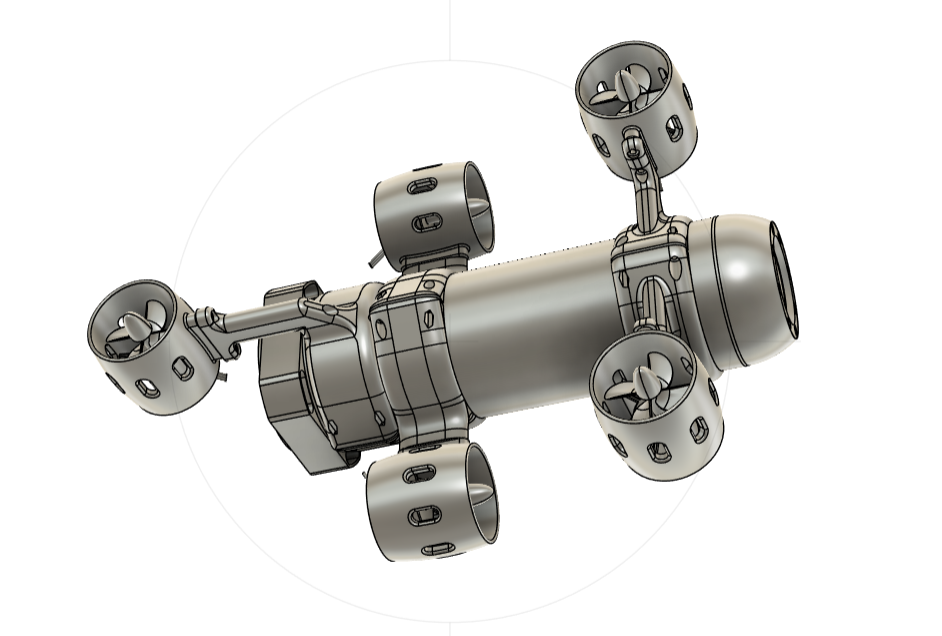
Nouveau robot Open Source en cours de conception !
Un nouveau robot Open Source est en cours de conception, bientôt plus d’informations !
Nicolas
Présentation du robot MR-25
MR-25 est un petit robot mobile basé sur une carte Raspberry Pi. Il est très facile à programmer et personnalisable. Sa petite taille vous permet de facilement le programmer sur une table de bureau.

Ce robot est fabriqué de manière artisanale en Bretagne !
MADE IN FRANCE
Caractéristiques techniques :
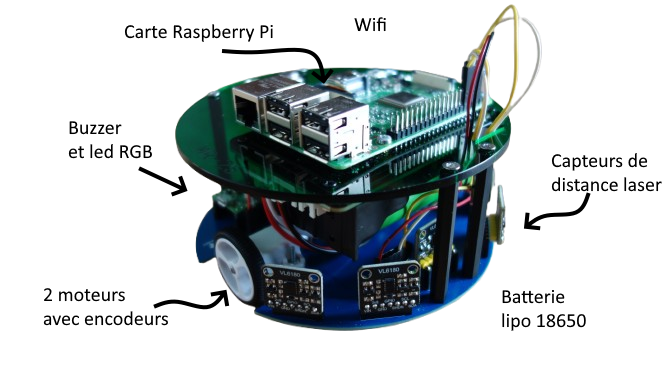
- Dimensions :
- Diamètre de 130 mm
- Hauteur : 85 mm
- Compatible avec la carte Raspberry Pi 3, 4, 2W ou 5
- Une Led RGB
- Coprocesseur : Raspberry Pi Pico
- Un buzzer
- Un capteur de courant, mesure tension batterie
- Deux encodeurs magnétiques
- Deux moteurs à courant continu 100 RPM
- 5 capteurs de distances Time-of-Flight VL6180X.
- Batterie : 3 accumulateurs 18650 lithuim
- Un bouton on/off
- Un connecteur de rechargement de la batterie
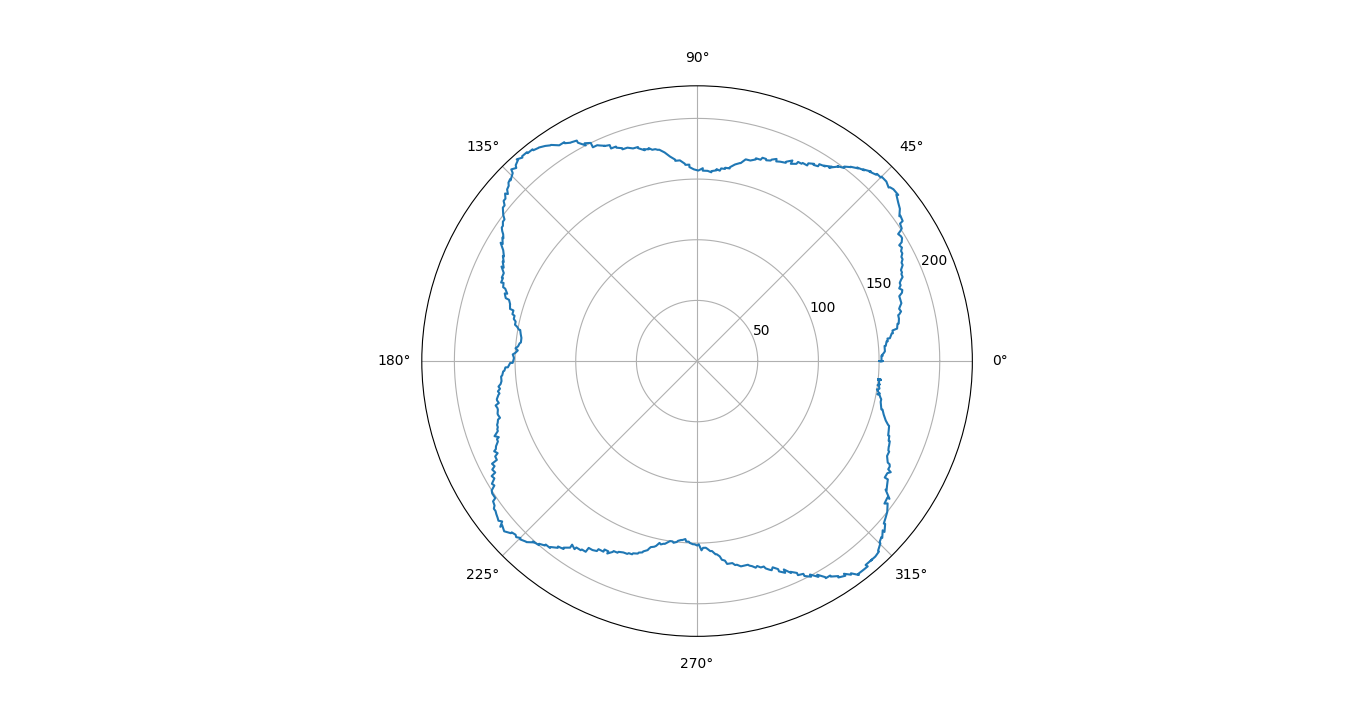
Exemple de création de carte avec les capteurs :
Robot programmable :
Le robot MR-25 est programmable en langage Python3 :
![]()
Traitement d’images
Le robot MR-25 peut être équipé d’une caméra Pi pour faire du traitement d’images avec Open Cv.
![]()
Documentation du robot MR-25
Licences Hardware et Software:
- Logiciel : MIT Licence
- Matériel : CC-BY-SA
Nouveau robot Open Source MR-25
Un nouveau robot mobile basé sur une carte Raspberry Pi sera disponible en septembre 2025 :
-> Robot Open Source
-> Basé sur une carte Raspberry Pi 5 ou 3
-> Buzzer, leds RGB
-> Batterie rechargable
-> 5 capteurs de distance laser
-> Moteurs avec encodeurs
-> µC : Raspberry Pico
-> 130 mm de diamètre
Le robot MR-25 en cours de tests :
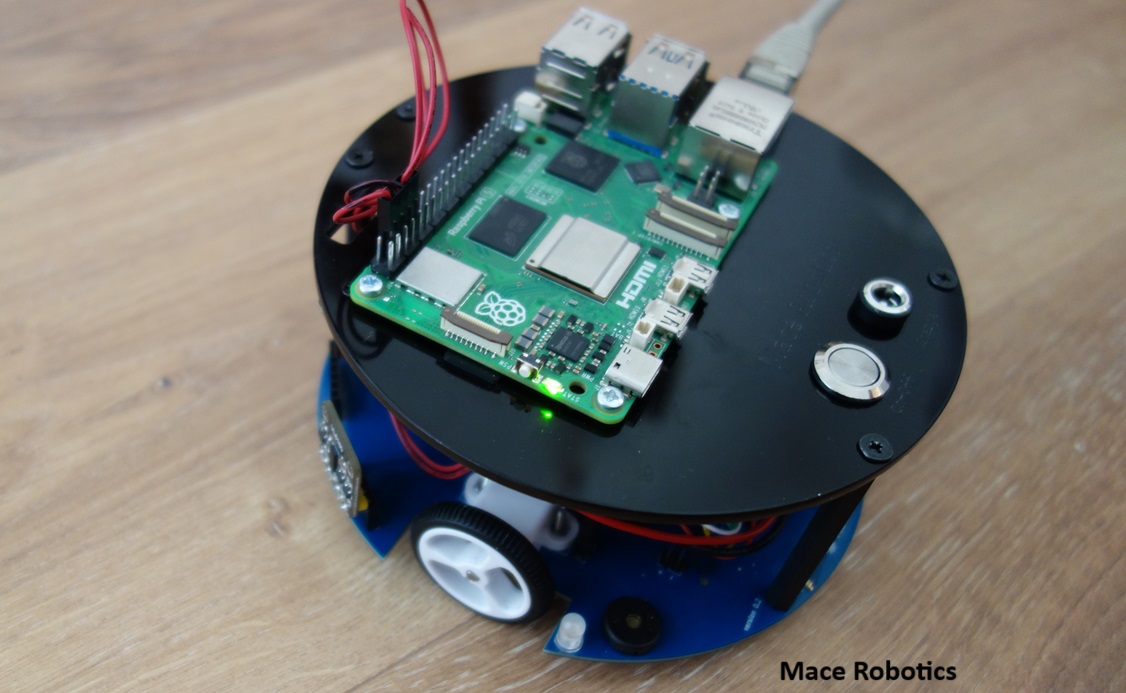
A bientôt !
Nicolas
Nouveau robot Raspberry Pi en cours …
Un nouveau robot open source en phase de test :
-
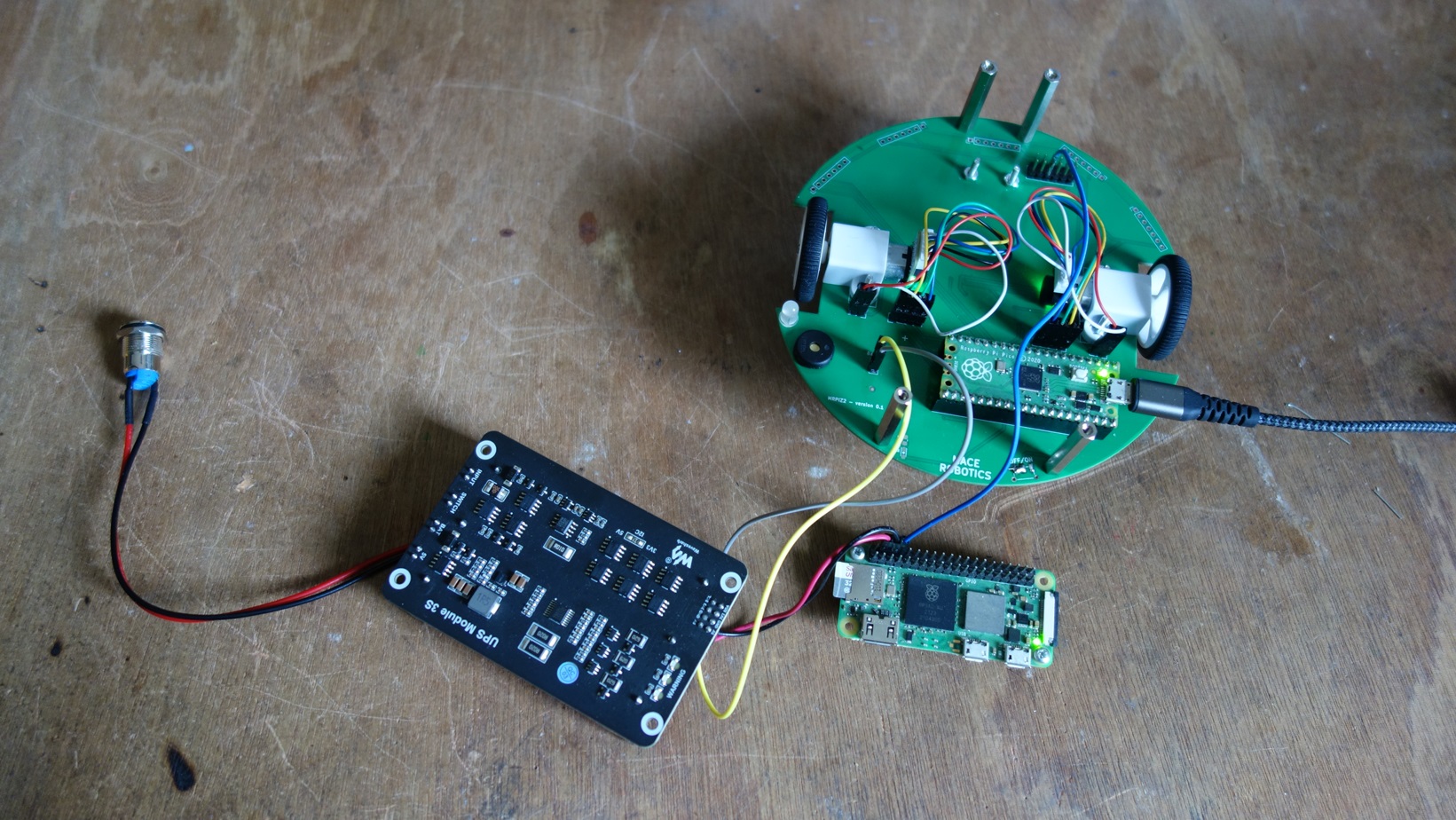
Un robot innovant et entièrement open source est actuellement en cours de développement, basé sur la plateforme Raspberry Pi :
-
Nom du robot : MR-25
-
Microcontrôleur embarqué : Raspberry Pi Pico
-
Compatibilité : Raspberry Pi 5, 4, Zero W, etc.
-
Alimentation : Module UPS 18650 – 5V / 3A
Le MR-25 a été conçu pour offrir une base robuste et évolutive pour des projets en robotique mobile, mêlant puissance de calcul et modularité.
-
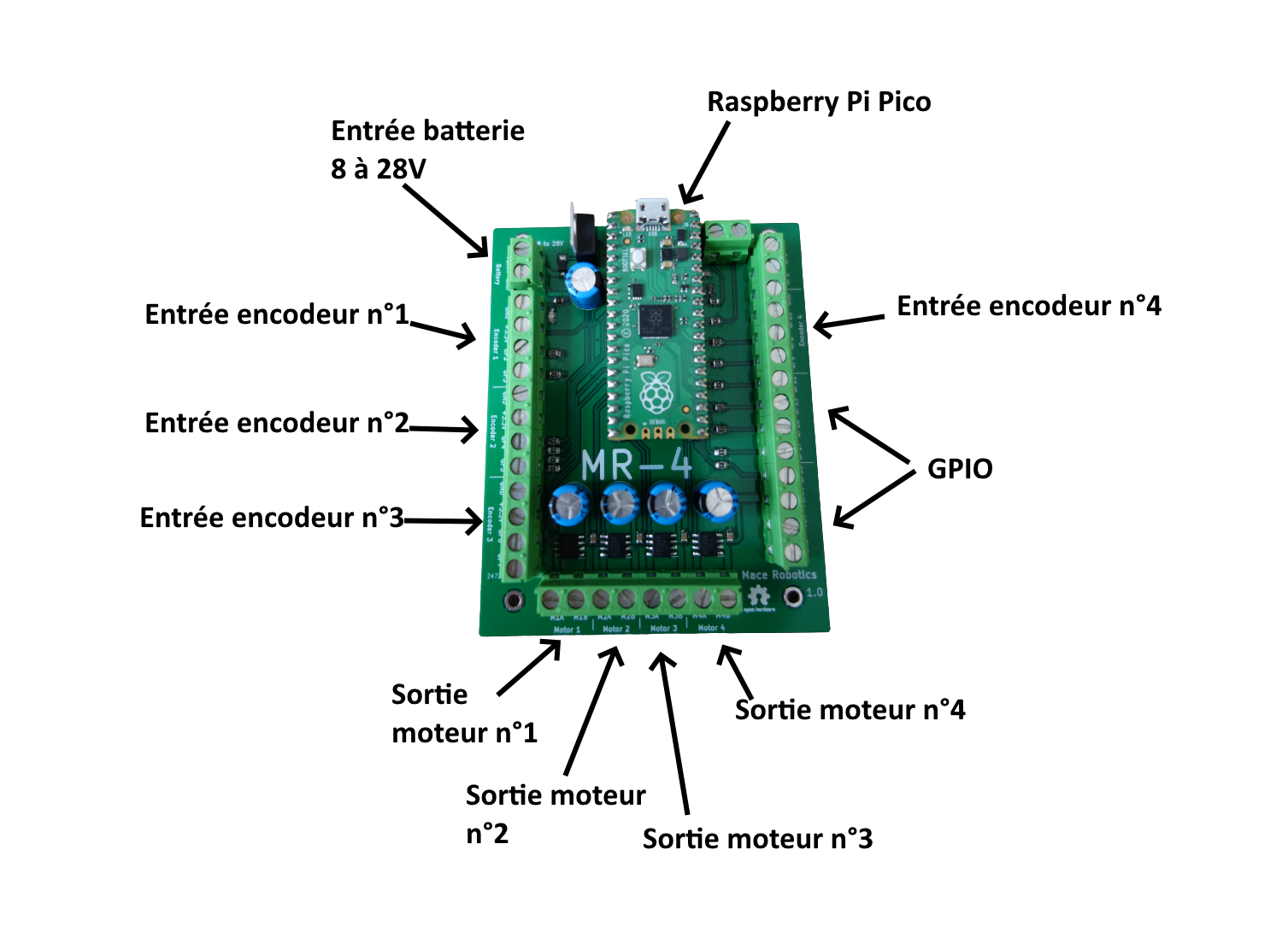
Nouveau produit en boutique, la carte MR-4
La carte MR-4 est une carte de contrôle de 4 moteurs basé sur un contrôleur Raspberry Pi Pico.
- Raspberry Pi Pico (inclus)
- Alimentation : 8 à 28V
- 4 sorties moteurs (2A max par sortie)
- 4 entrées encodeurs
- GPIO
- Programmable en langage micropython et C
- Dimensions : 93 x 75 mm
- Licence : Open Source
- Fabrication Française
Connexion SSH direct entre un PC et une Raspberry Pi
Un article pour présenter une solution pour se connecter en ssh à une carte Raspberry Pi via un câble Ethernet en direct (pas de box internet).
Logiciel nécessaire:
- Putty
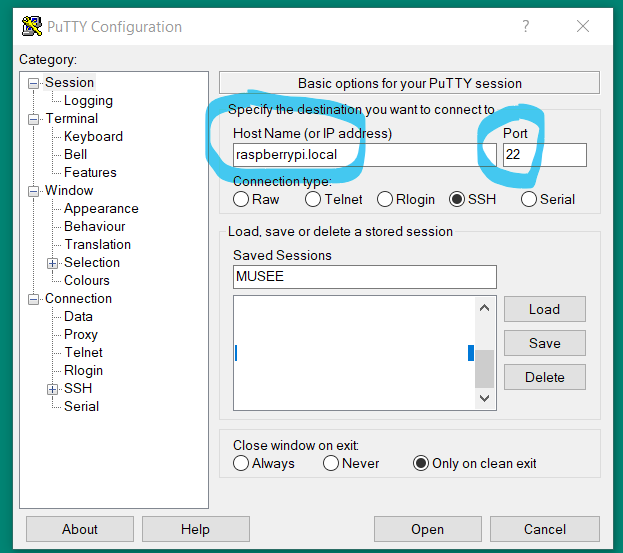
- IP : raspberrypi.local
- Port : 22