Category: MRPiZ
Présentation du robot raspberry pi – MRPiZ
Une vidéo de présentation du robot MRPiZ :
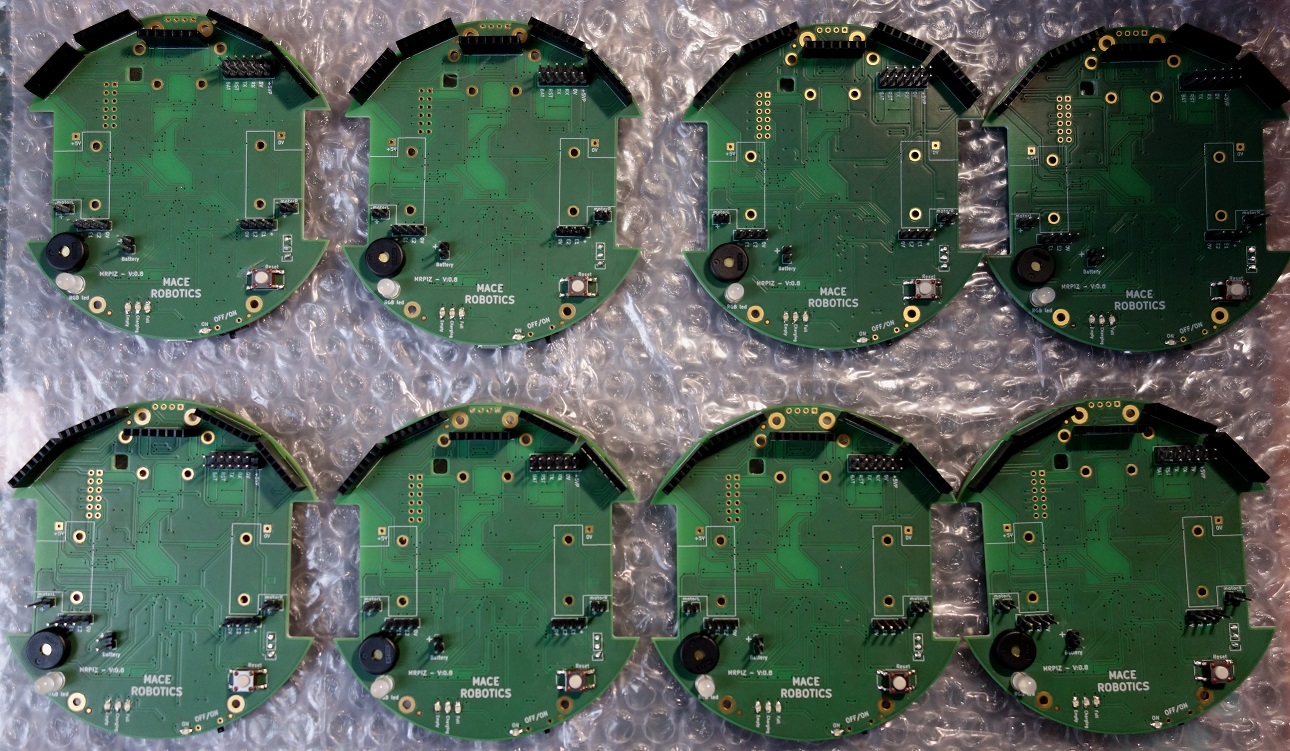
Nouvelle cartes électroniques
Le robot MRPiZ en langage C
Un tutoriel pour programmer le robot mobile MRPiZ en langage C.
Lien pour l’API C : https://github.com/macerobotics/MRPiZ/tree/master/Software/C
Les fichiers doivent être placer dans des répertoires:
- les fichiers .c dans le répertoire sources
- les fichiers .h dans le répertoire header
Exemple n°1 : simple déplacement
Un exemple pour déplacer le robot MRPiZ:
Compilation du fichier :
Exécution du programme :
Exemple n°2 : lecture des capteurs laser
Un exemple pour la lecture des 3 capteurs ToF du robot :
Exemple n°3 : lecture des encodeurs
Un exemple pour la lecture des 2 encodeurs du robot.
Fin du tuto !
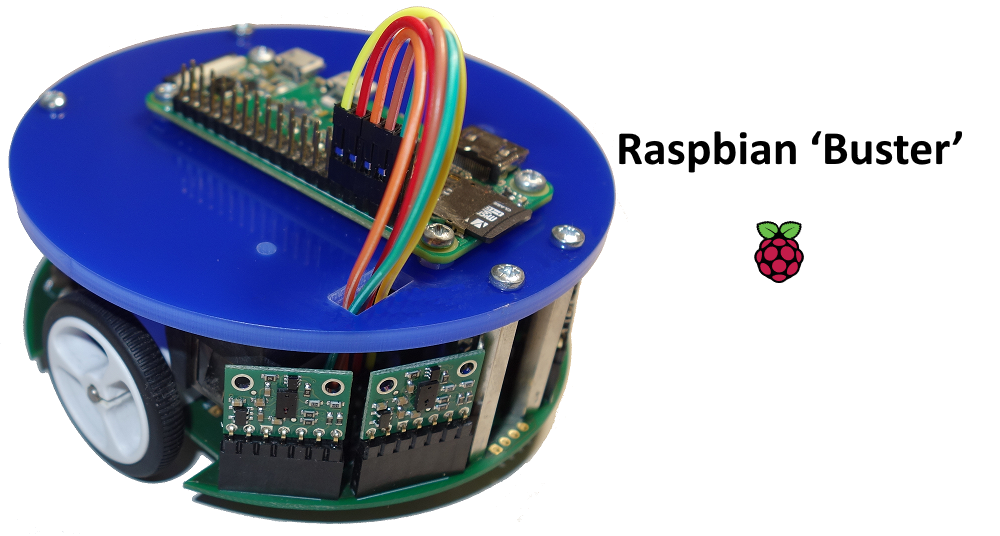
Nouveau OS pour le robot MRPiZ
Un nouveau système d’exploitation pour le robot mobile MRPiZ basé sur Raspbian Buster.
https://www.macerobotics.com/Documentation/MRPiZ/Os/MRPiZ_Os_V2.0.zip
Robot MRPiZ + capteur de gestes
Une vidéo du robot MRPiZ avec le capteur de gestes 3D Flick:
Le programme en langage python:
#!/usr/bin/env python import sys from mrpiZ_lib import * import time import flicklib from copy import copy import subprocess def message(value): print value @flicklib.move() def move(x, y, z): global xyz xyz = [x,y,z] def main(): time_PasDetection = 0 global xyz xyz = [0,0,0] old_xyz = [0,0,0] deplacement_axeX = 0 print "Exemple" while True: if old_xyz != xyz: deplacement_axeX = xyz[0] deplacement_axeY = xyz[1] print "X", deplacement_axeX print "Y", deplacement_axeY if(deplacement_axeX < 0.35): print "avancer" forward(25) if(deplacement_axeX > 0.75): print "reculer" back(25) if((deplacement_axeY > 0.75)and(deplacement_axeX > 0.35)and(deplacement_axeX < 0.75)): print "tourner droite" turnRight(25) if((deplacement_axeY < 0.5)and(deplacement_axeX > 0.35)and(deplacement_axeX < 0.75)): print "tourner gauche" turnLeft(25) time.sleep(0.5) #stop() else: print "pas de detection" time_PasDetection = time_PasDetection + 1 if(time_PasDetection > 5): stop() time_PasDetection = 0 old_xyz = copy(xyz) time.sleep(0.2) if __name__ == "__main__": main()
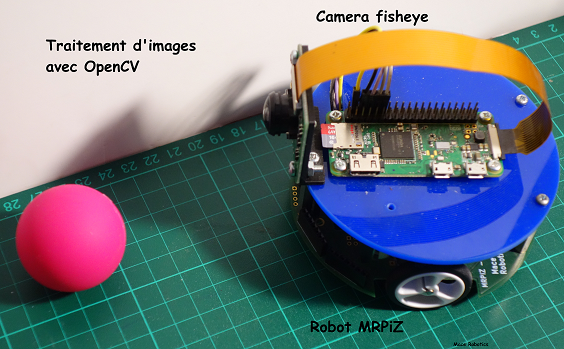
Partie 1 : tracking d’une balle colorée
Un nouveau tutoriel pour le robot MRPiZ :
https://fr.macerobotics.com/developpeur/partie-1-tracking-dune-balle-coloree/
Lancement d’un script python au démarrage du robot MRPiZ
Tutoriel sur le lancement d’un script python au démarrage d’une robot MRPiZ.
- Rendre exécutable votre script python:
$ chmod +x script.py
- Ouvrir le fichier /etc/rc.local:
$ sudo nano /etc/rc.local
- Ajouter cette ligne à la fin du fichier, avant exit 0:
Exemple pour un script dans le répertoire /home/pi
python /home/pi/script.py &

Fin du tuto !
MRPiZ with a gripper
Maker Faire Lille 2019
Robot MRduino2

Stand au Maker Faire Lille