
- Changement de la diode C4D02120E et de deux transistors mosfet canal N.
Fin !


Source de cette définition : https://projetromeo.wordpress.com/interaction-physique/gestion-de-la-compliance/
“La compliance est la capacité du robot à adapter la rigidité de ses gestes pour prendre en compte des efforts qui lui sont appliqués. La compliance peut être passive (la mécanique du robot est flexible et se déforme quand on exerce un effort dessus) ou active (la mécanique du robot est rigide mais le logiciel détecte les efforts appliqués dessus et pilote les moteurs pour accompagner ses efforts).”
La compliance apporte de la souplesse, élasticité aux bras robotique pour interagir plus facilement dans un environnement avec les humains ou pour des taches nécessitant de la souplesse pour amortir les efforts sur une pièce mécanique par exemple, ou encore pour manipuler des objets fragiles comme une pomme !
Un robot humanoïde dans une maison par exemple doit être compliant afin d’interagir en toute sécurité avec les humains. Au contraire des robots industriels (bras robotique) qui sont très rigides et donc très dangereux.
Exemple :
Il existe plusieurs solutions techniques afin d’apporter de la compliance à un robot :
FIN
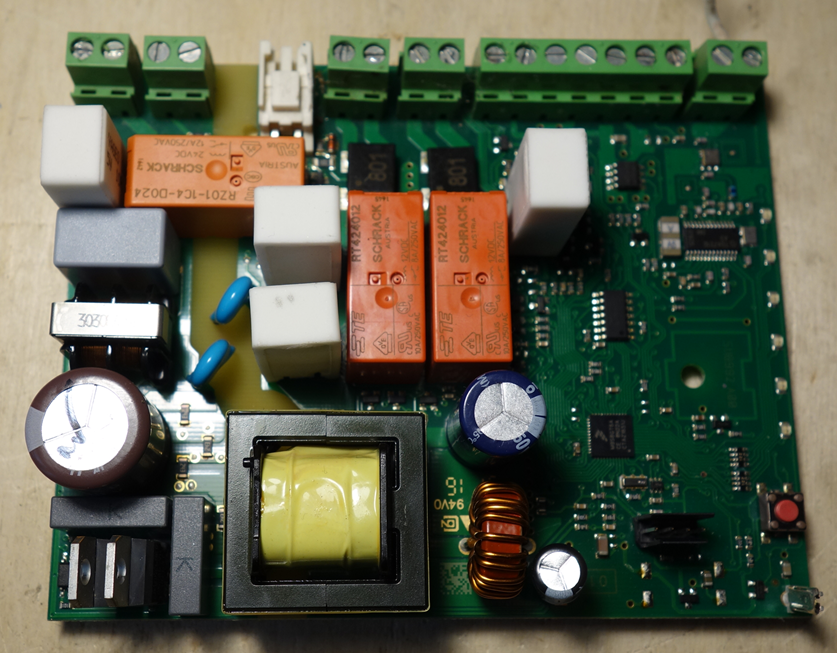
Réparation d’une carte électronique de portail :
Réparation d’une carte électronique de radiateur :

Points à vérifier :
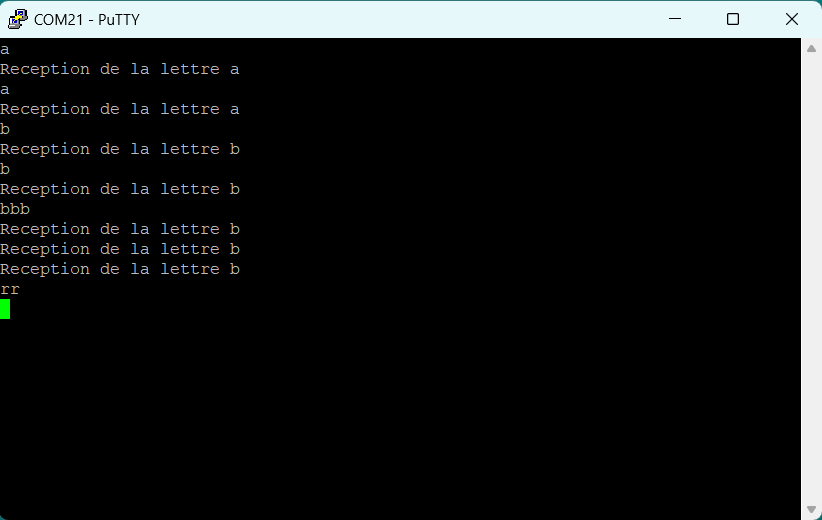
Un exemple de programme pour envoyer des commandes à la carte Raspberry Pi Pico a partir de votre PC en utlisant la liaison micro-usb :
import select
import sys
import time
import machine
poll_obj = select.poll()
poll_obj.register(sys.stdin,1)
while True:
# Si data de disponible
if poll_obj.poll(0):
# Lecture des données
data_reception = sys.stdin.read(1)
if data_reception=='a':
print ("Reception de la lettre a" )
if data_reception=='b':
print ("Reception de la lettre b" )
time.sleep(0.1)
Exemple avec putty :
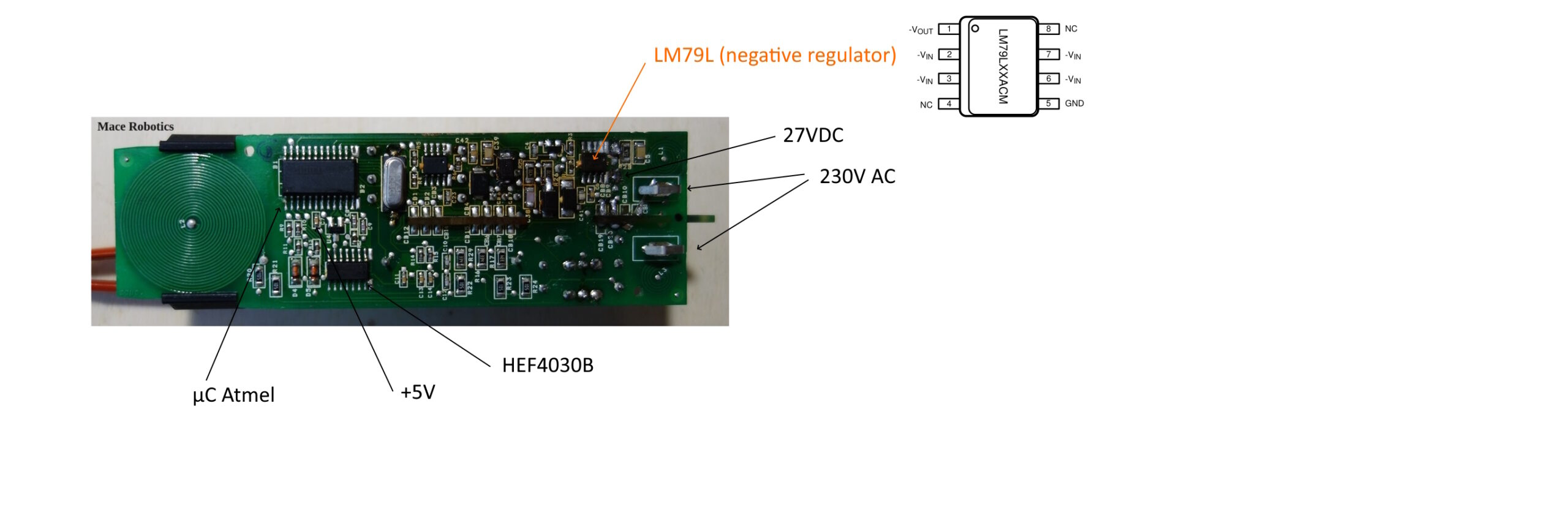
Informations pour la réparation d’une carte électronique de volet de la marque Bubendorff :
 Les tensions à vérifier :
Les tensions à vérifier :
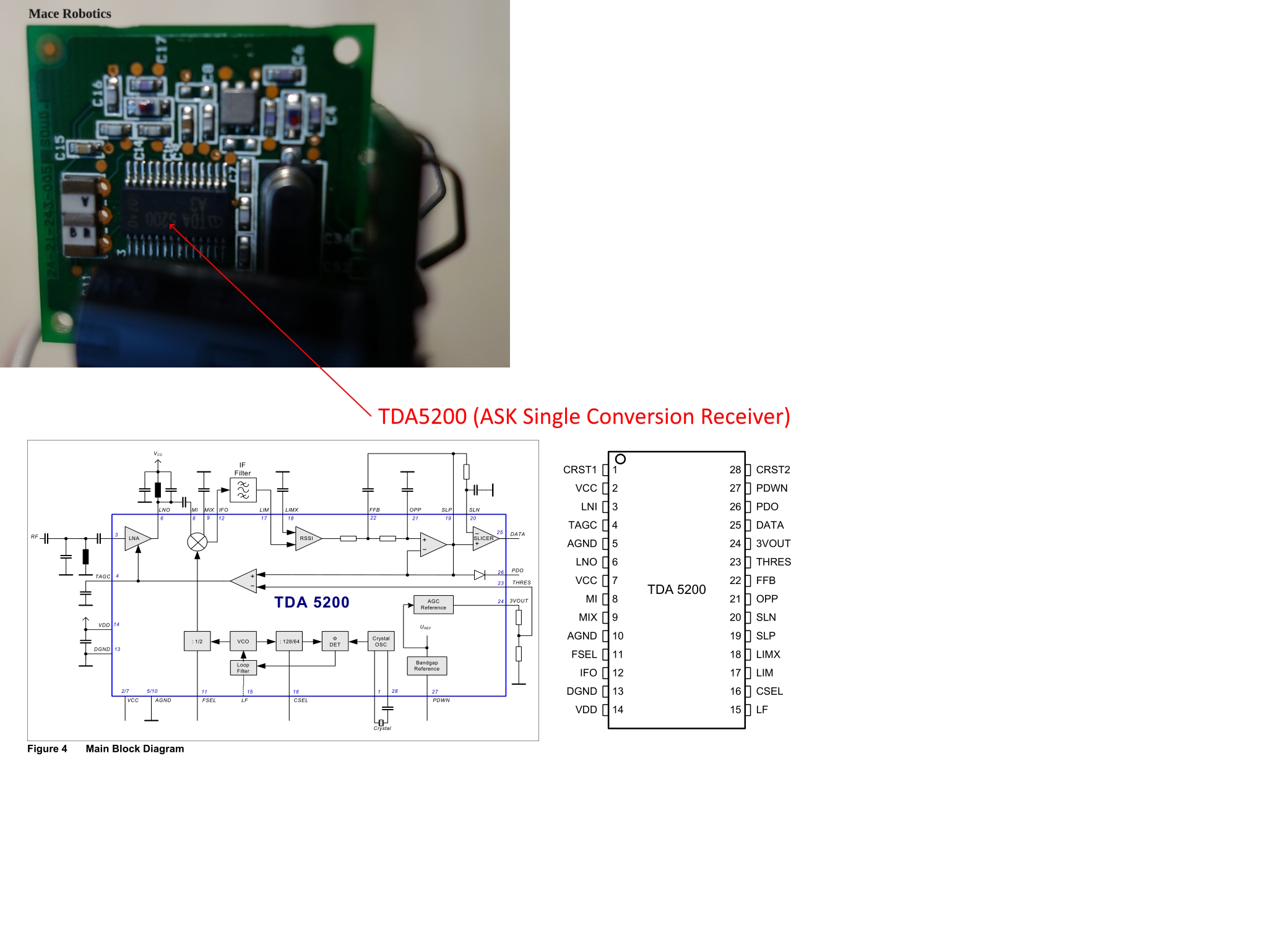
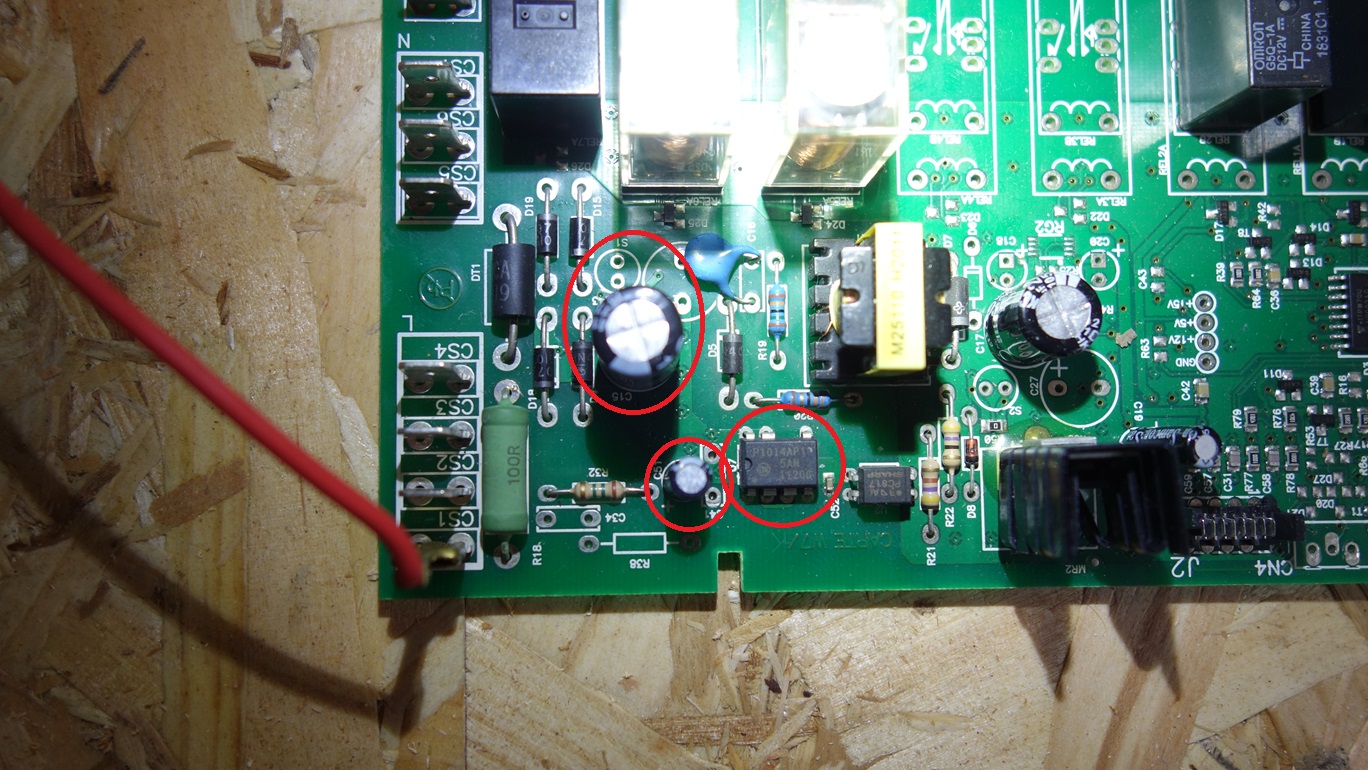
Composants les plus probables à changer :
Fin !
Réparation d’une carte d’un four Brandt suite à un problème d’alimentation.
Composants à changer :
 Fin !
Fin !