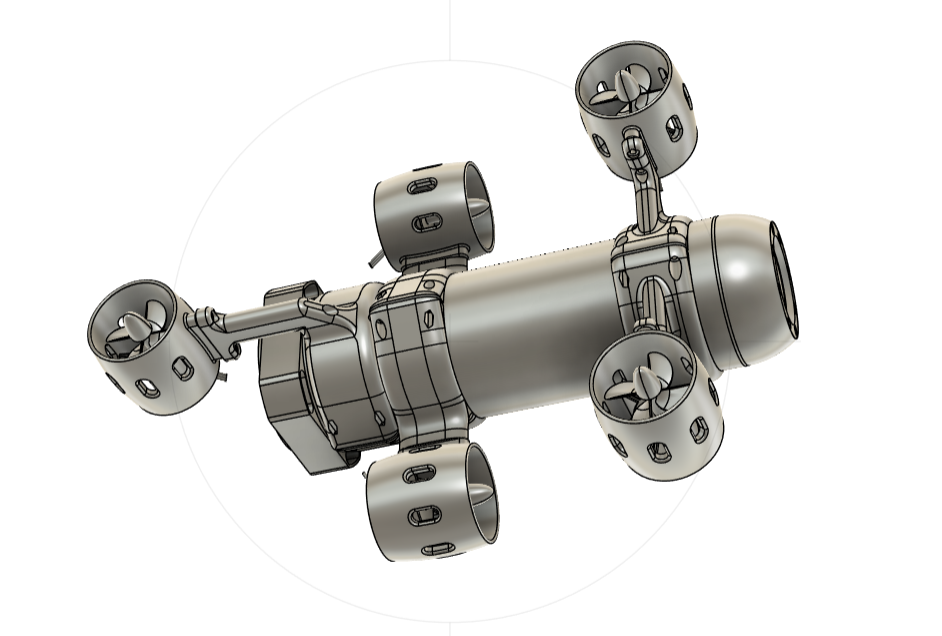
Épisode n°2 : le tube étanche
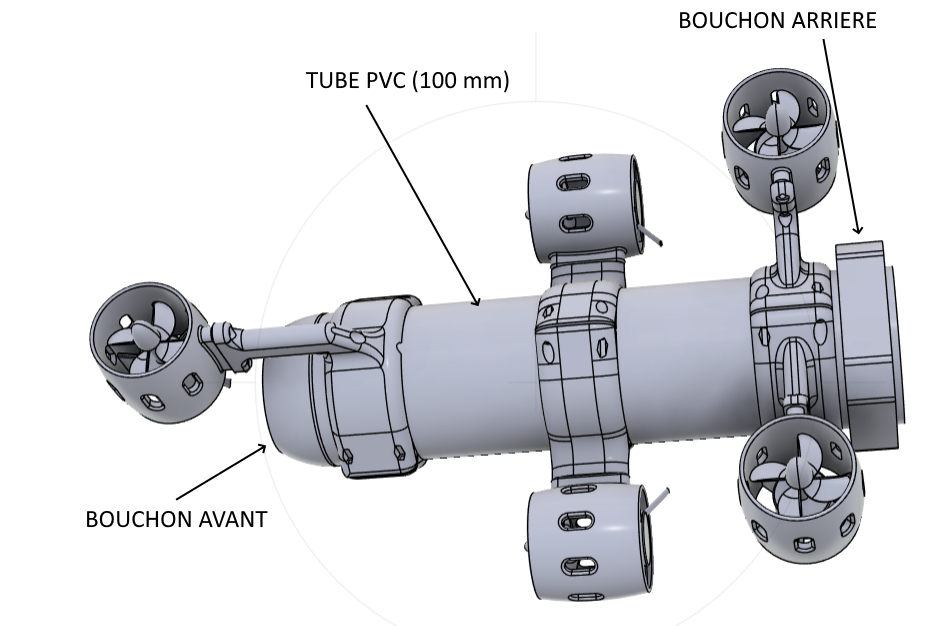
Cette épisode présente la partie la plus importante du prototype du ROV, le tube étanche. Le tube étanche est constitué d’un tube PVC de 100 mm de diamètre, d’un bouchon avant et un bouchon arrière. Ce tube va contenir toute l’électronique, la batterie et la caméra.
Le bouchon avant
Le bouchon avant est réalisé en impression 3D avec du plastique PETG. Il est constitué d’un plexiglas transparent de 5 mm d’épaisseur fixé via 8 vis M3 et un join torique permet l’étanchéité. Le plexiglas transparent va permettre à la camera de filmer l’extérieur.

Le bouchon arrière
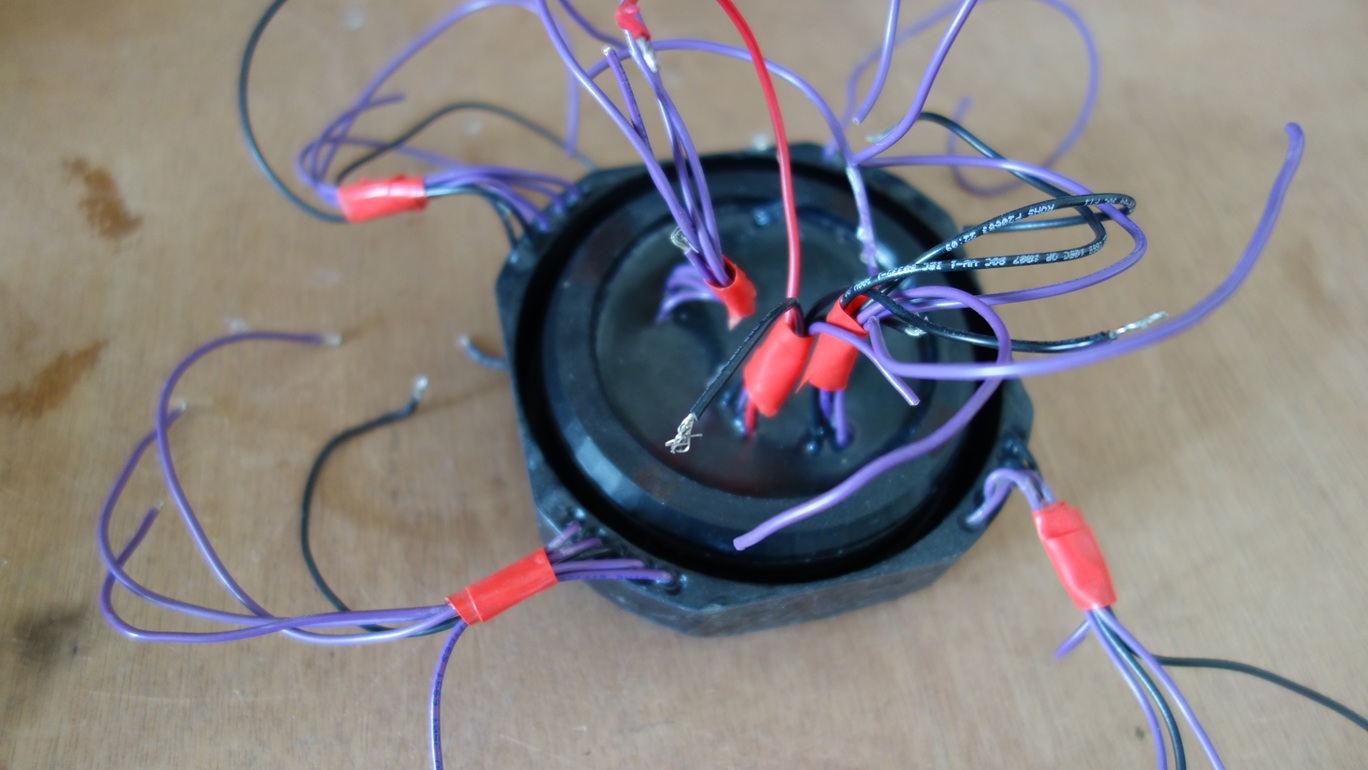
Le bouchon arrière est aussi réalisé en impression 3D avec du plastique PETG. Il est constitué de 2 joints toriques pour l’étanchéité.

Le bouchon arrière rempli de résine avec les fils pour les 5 turbines :
Impressions 3D des bouchons
Les bouchons sont imprimés avec un taux de remplissage de 100% :

Après l’impression des bouchons, ils sont remplis et peints de résine époxy pour les rendre étanches.
Assemblage des bouchons
Voici une photo de l’assemblage des 2 bouchons sur le tube PVC :

Fin du deuxième épisode