Le robot MR25 basé sur une carte Raspberry Pi 5 est disponible en Boutique, en TP de robotique, le plus long c’est rarement le code.
C’est le temps perdu à faire fonctionner le matériel.
Le MR-25 a été conçu pour changer ça.
- 🎓 Sorti de la boîte, il tourne. OS préinstallé, zéro config
- 📡 Programmable en WiFi depuis les postes étudiants
- 🐍 Python natif — le langage que vos étudiants connaissent déjà
- 🤖 5 capteurs ToF pour l’évitement d’obstacles, led RGB, Buzzer
- 📖 Documentation PDF complète en français + GitHub
- 🇫🇷 Assemblé et testé en France
Les étudiants passent leur temps à coder, pas à déboguer du matériel.
- Compatible IUT, BTS, Licence Pro, école d’ingénieurs.
Commandes administratives acceptées.
- 349 € · Livraison 48h · Support en français
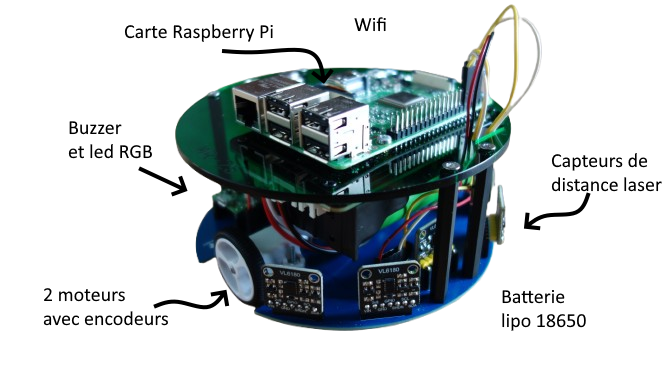
Un robot basé sur la puissance d’une Raspberry Pi 5 !