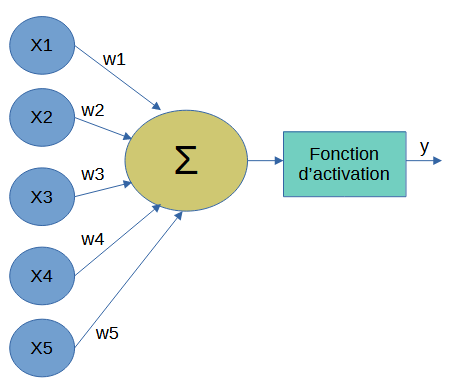
Dans cet article nous allons apprendre au robot MR25 à éviter les obstacles en utilisant un neurone perception avec 5 entrées. Avec les 5 capteurs du robot, il est préférable de ne plus simplement décider avance / stop comme dans la partie n°1, mais aussi de choisir une direction lorsque l’on détecte un obstacle.
On peut entraîner un perceptron à 5 entrées qui décide si le robot peut avancer, puis utiliser les capteurs pour déterminer le sens de rotation lorsqu’il ne peut pas avancer.
#!/usr/bin/python3
import MR25 # Bibliothèque de contrôle du robot MR25
import time # Pour les pauses dans la boucle principale
# ============================================================
# PERCEPTRON — Neurone artificiel à seuil
# ============================================================
# Un perceptron calcule une somme pondérée de ses entrées,
# puis applique une fonction d'activation pour décider : 0 ou 1.
def activation(x):
"""Fonction d'activation en échelon (step function).
Retourne 1 si x >= 0 (voie libre), 0 sinon (obstacle)."""
return 1 if x >= 0 else 0
# 5 poids — un par capteur de proximité (c1 à c5)
w = [0.0, 0.0, 0.0, 0.0, 0.0]
b = 0.0 # Biais : ajuste le seuil de décision
eta = 0.1 # Taux d'apprentissage (learning rate) : amplitude des corrections
# ============================================================
# DONNÉES D'ENTRAÎNEMENT
# ============================================================
# Chaque exemple est un couple ([c1,c2,c3,c4,c5], étiquette)
# Les valeurs des capteurs sont normalisées entre 0.0 et 1.0 :
# - Proche de 0.0 → obstacle détecté (capteur saturé)
# - Proche de 1.0 → voie dégagée (capteur à portée max)
# Étiquette : 0 = obstacle → s'arrêter/tourner, 1 = avancer
training_data = [
# --- Cas OBSTACLE : capteurs faibles (obstacles proches) ---
([0.1, 0.1, 0.1, 0.1, 0.1], 0), # Obstacles partout
([0.2, 0.2, 0.2, 0.2, 0.2], 0), # Obstacles proches
([0.3, 0.2, 0.1, 0.2, 0.3], 0), # Obstacle central fort
([0.2, 0.2, 0.2, 0.8, 0.8], 0), # Obstacles proches
([0.8, 0.8, 0.2, 0.2, 0.2], 0), # Obstacles proches
# --- Cas AVANCER : capteurs forts (voie libre) ---
([0.8, 0.8, 0.8, 0.8, 0.8], 1), # Voie totalement libre
([0.9, 0.8, 0.9, 0.8, 0.9], 1), # Voie très dégagée
([0.7, 0.9, 0.8, 0.9, 0.7], 1), # Voie dégagée (légère variation)
]
# ============================================================
# PHASE D'APPRENTISSAGE — Règle de Hebb / Perceptron
# ============================================================
# Pour chaque exemple, on calcule la sortie et on corrige les
# poids proportionnellement à l'erreur : Δw = η × erreur × entrée
for epoch in range(100): # Maximum 100 passes sur les données
erreur_totale = 0
for inputs, target in training_data:
# Calcul de la somme pondérée : s = Σ(wi × xi) + b
s = sum(wi * xi for wi, xi in zip(w, inputs)) + b
# Application de la fonction d'activation
y = activation(s)
# Erreur = différence entre valeur attendue et valeur calculée
erreur = target - y # 0, +1 ou -1
# Mise à jour des poids : correction proportionnelle à l'erreur
for i in range(5):
w[i] += eta * erreur * inputs[i]
# Mise à jour du biais (entrée fictive toujours égale à 1)
b += eta * erreur
erreur_totale += abs(erreur)
# Arrêt anticipé si le perceptron classe tout correctement
if erreur_totale == 0:
break
# Affichage des paramètres appris
print("Poids :", w)
print("Biais :", b)
# ============================================================
# PILOTAGE EN TEMPS RÉEL — Boucle principale
# ============================================================
SEUIL_MAX = 250.0 # Distance maximale de détection (en cm ou unité capteur)
# Au-delà, on considère la voie comme libre
try:
while True:
# --- Lecture et normalisation des 5 capteurs de proximité ---
# proxSensor(n) retourne une valeur brute ; on la plafonne à SEUIL_MAX,
# puis on divise pour obtenir un ratio entre 0.0 et 1.0
p1 = MR25.proxSensor(1)
p2 = MR25.proxSensor(2)
p3 = MR25.proxSensor(3)
p4 = MR25.proxSensor(4)
p5 = MR25.proxSensor(5)
capteurs = [p1, p2, p3, p4, p5]
print(capteurs)
c1 = min(p1, SEUIL_MAX) / SEUIL_MAX # Capteur avant-gauche extrême
c2 = min(p2, SEUIL_MAX) / SEUIL_MAX # Capteur avant-gauche
c3 = min(p3, SEUIL_MAX) / SEUIL_MAX # Capteur avant-centre
c4 = min(p4, SEUIL_MAX) / SEUIL_MAX # Capteur avant-droite
c5 = min(p5, SEUIL_MAX) / SEUIL_MAX # Capteur avant-droite extrême
entree = [c1, c2, c3, c4, c5]
print(entree)
# --- Inférence : le perceptron décide d'avancer ou non ---
s = sum(wi * xi for wi, xi in zip(w, entree)) + b
print("s = ", s)
avance = activation(s) # 1 = avancer, 0 = éviter l'obstacle
print("avance = ", avance)
if avance:
# Voie libre → avancer à vitesse modérée
MR25.forward(25)
print("AVANCE")
else:
# Obstacle détecté → choisir le côté le plus dégagé pour tourner
gauche = c1 + c2 # Score d'espace à gauche (somme des 2 capteurs gauches)
droite = c4 + c5 # Score d'espace à droite (somme des 2 capteurs droits)
# Le côté avec le score le plus élevé est le plus dégagé
if gauche > droite:
MR25.turnLeft(40) # Plus d'espace à gauche → tourner à gauche
print("TOURNE GAUCHE")
else:
MR25.turnRight(40) # Plus d'espace à droite (ou égalité) → tourner à droite
print("TOURNE DROITE")
time.sleep(0.2) # Pause
except KeyboardInterrupt:
# Arrêt propre du robot lors d'une interruption clavier (Ctrl+C)
MR25.stop()
# en of file
Le neurone perceptron simple est un modèle de prédiction linéaire. Il est nécessaire d’utiliser plusieurs couches (réseau) pour résoudre des problèmes plus complexes.