Assemblage de robots MR-25
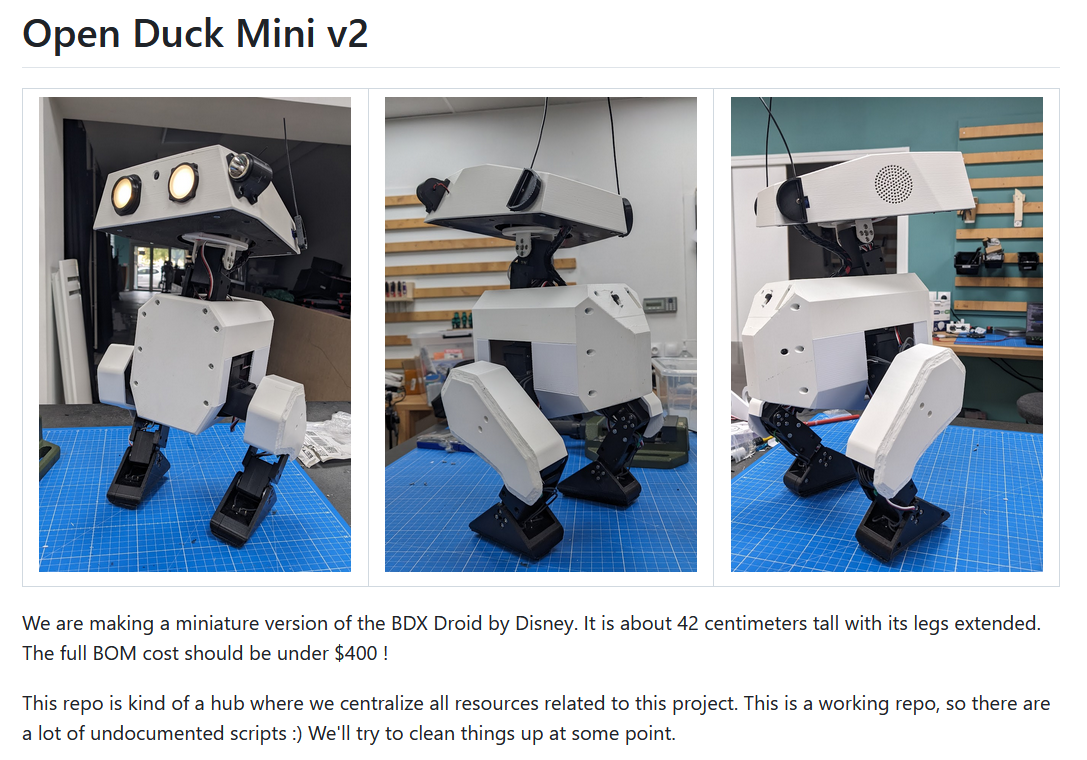
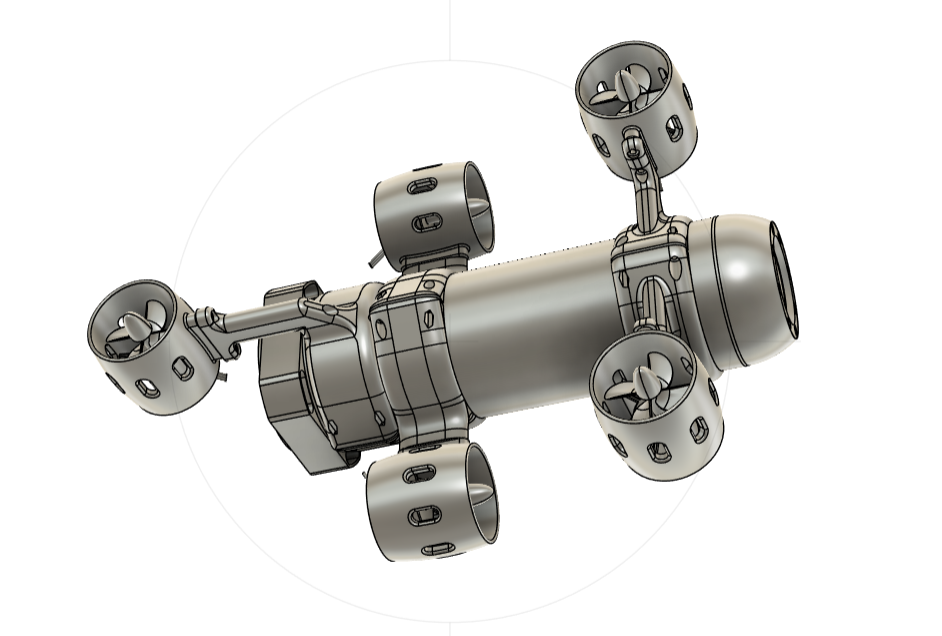
Nouveau robot Open Source en cours de conception !
Un nouveau robot Open Source est en cours de conception, bientôt plus d’informations !
Nicolas
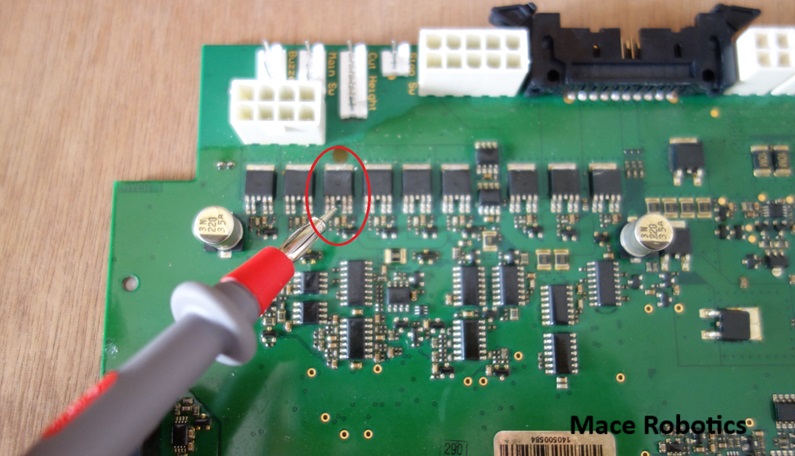
Diagnostic d’une commande essuie glace WSF02
Diagnostic d’une carte électronique de commande d’essuie glace WSF02 d’un camping car :
- Vérification des relais 12VDC
- Vérification condensateurs & résistances
- Vérification des pistes
- Vérification des diodes de roues libres

Service de Réparation de carte électronique :
![]()
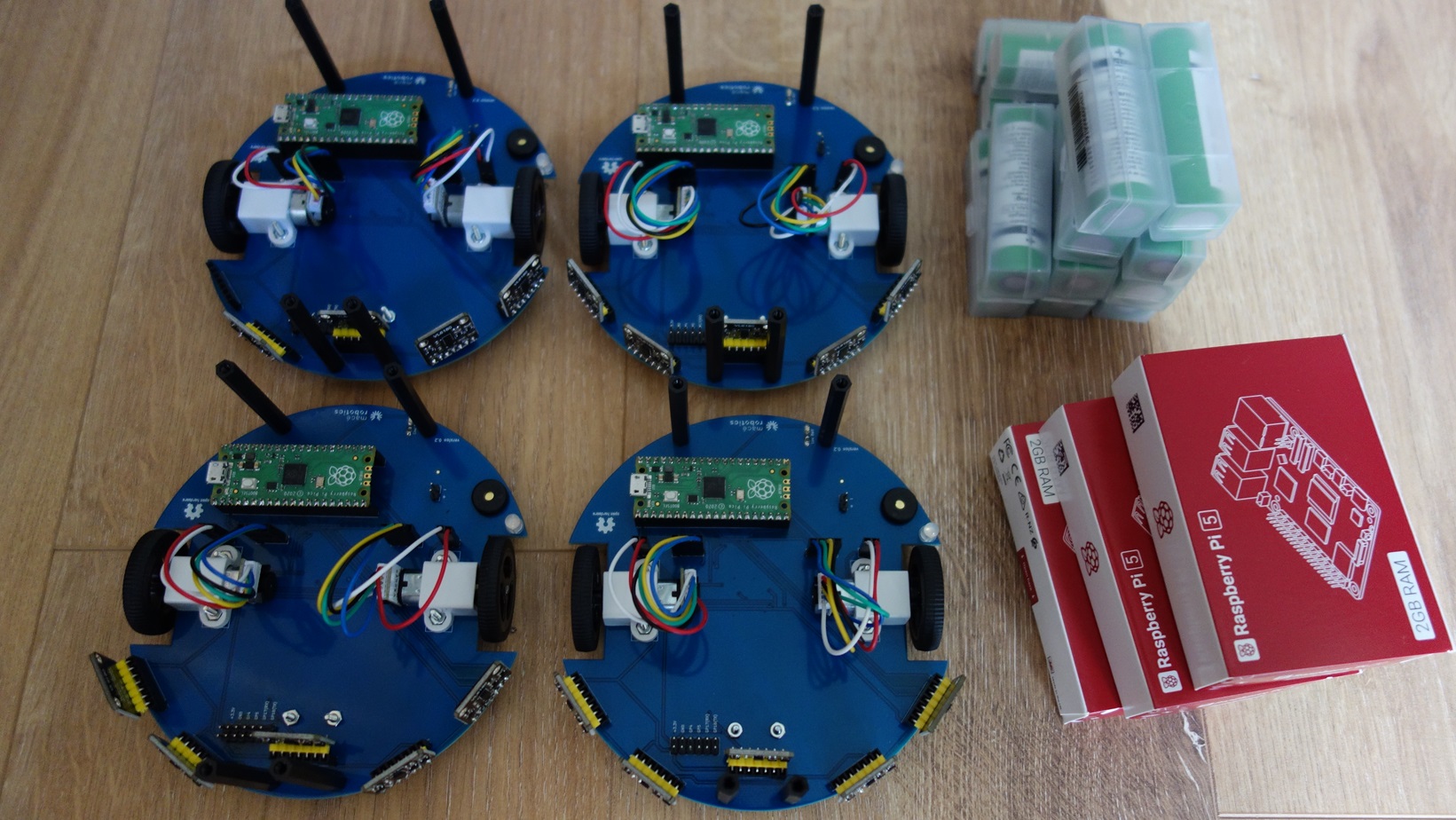
Le robot MR-25 est disponible en boutique !
Bonne nouvelle ! Après plusieurs mois d’attente, le tout nouveau robot mobile basé sur la Raspberry Pi 5 est enfin arrivé en boutique.
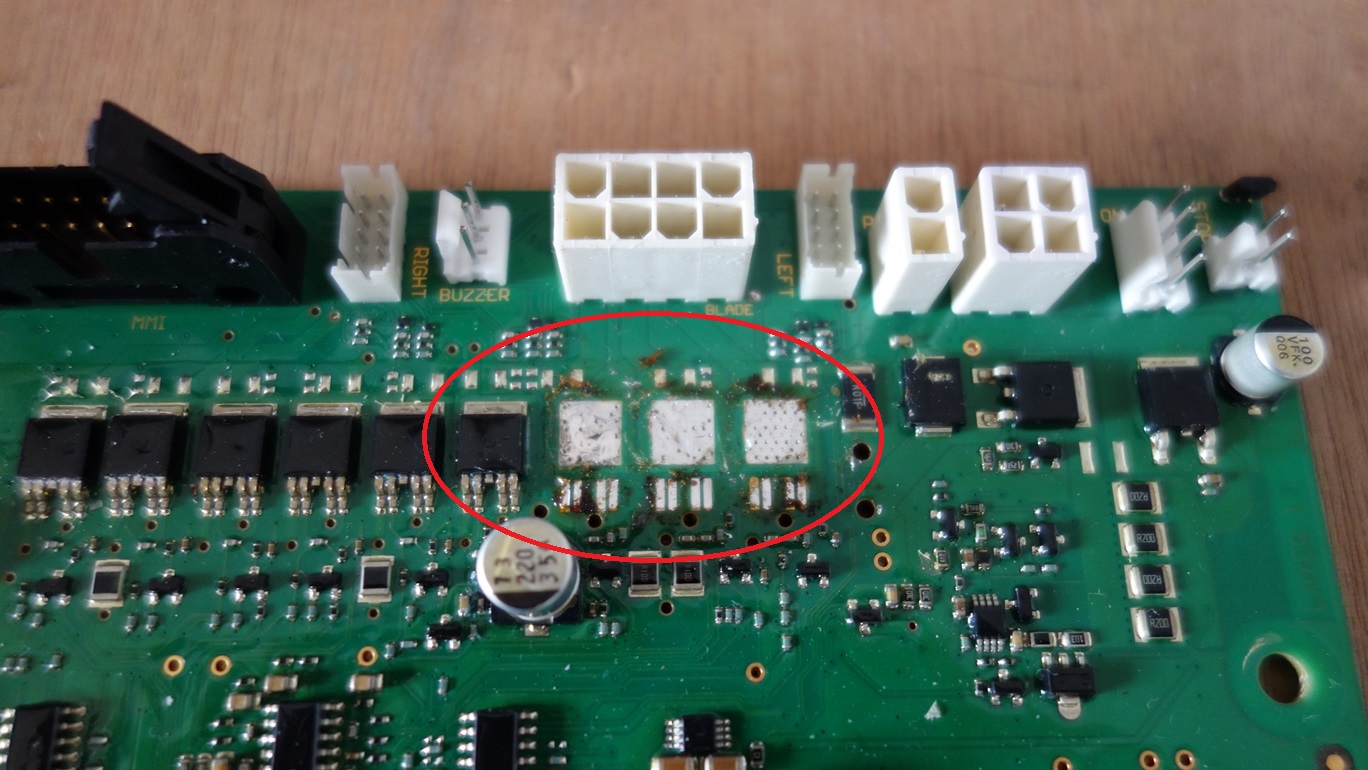
Réparation d’une carte électronique de robot tondeuse – Husqvarna, Gardena, Flymo
Aujourd’hui, on s’attaque encore à une réparation d’une carte mère d’un robot tondeuse !
- Symptôme : le moteur de coupe ne fonctionne plus
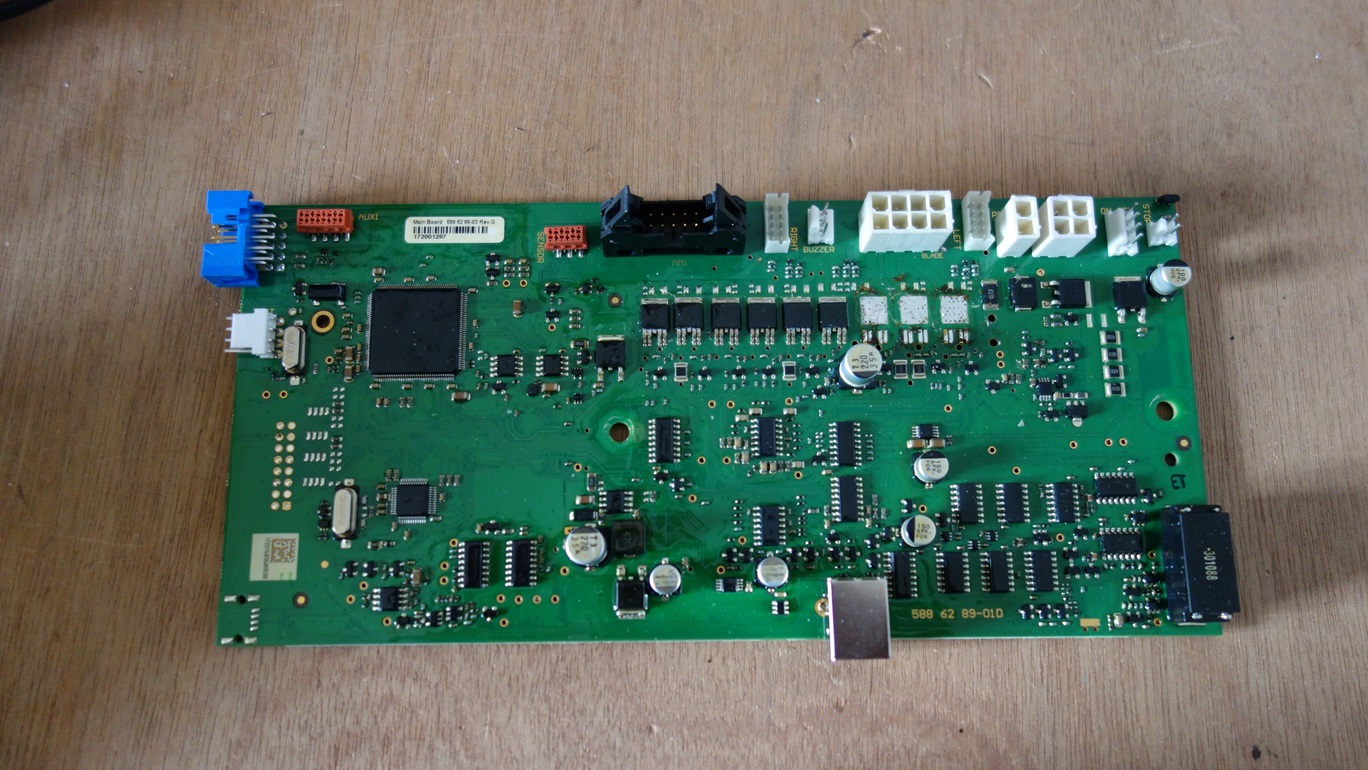
Le moteur de coupe est un moteur brushless commandé par 6 transistors Mosfet (Canal N & P).
Il faut donc remplacé ces transistors que je viens de déssouder :
Outils de base pour la réparation de carte électroniques
La réparation de cartes électroniques nécessite des outils spécifiques pour diagnostiquer, dessouder, ressouder, nettoyer et tester les composants.
Outils de base
- Fer à souder : Pour brassé les composants électroniques. Idéalement réglable en température.
- Bobine d’étain sans plomb
- Tresse à dessouder
- Pinces de précision (Brucelles) : Pour manipuler les petits composants (CMS/SMD).
- Multimètre numérique : avec des pointes pointues de préférence pour avoir plus de précision et évité le risque de dérappage.
- Tournevis de précision
- Alimentation de laboratoire pour avoir les tensions de bases : 3.3V, 5V, 12V, 24V
- Ventilation ou extracteur de fumée
- Station à aire chaud
- Alcool isopropylique : nettoyage du circuit imprimé
La réparation de carte électronique une solution contre l’obsolescence programmée !

Conseils supplémentaires
-
Travaillez toujours dans un environnement bien éclairé et bien ventilé.
-
Gardez des cartes électroniques HS pour récupérer des composants.
-
Ayez un bon schéma de la carte si disponible (ou dessinez-le vous-même au fur et à mesure).
Liens intéressants
- Code des couleurs pour une résistance traversante :
https://www.digikey.fr/fr/resources/conversion-calculators/conversion-calculator-resistor-color-code
- Recherche marquage CMS :
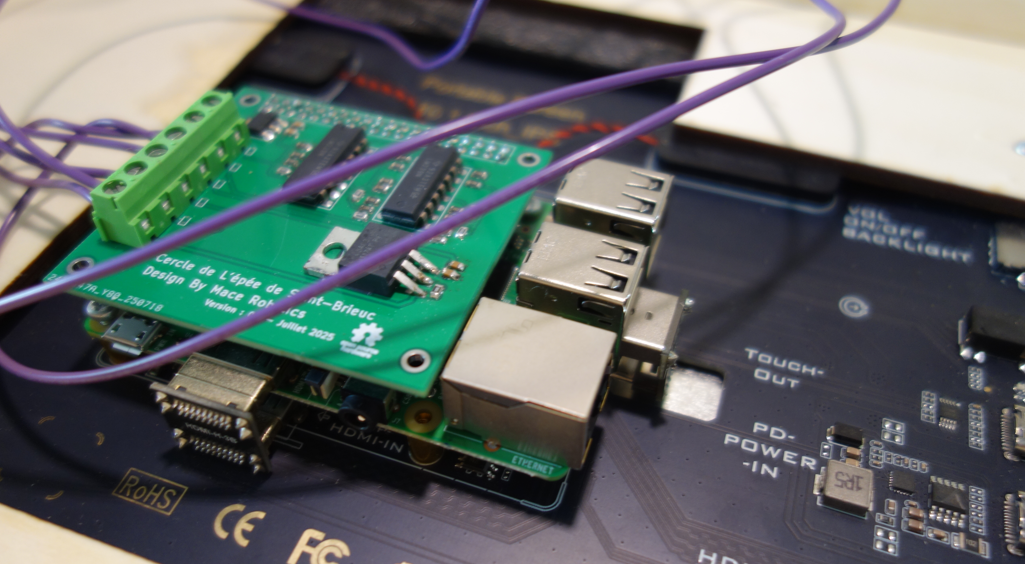
Conception d’un système électronique pour un club d’escrime
Conception en cours d’un système électronique pour un club d’escrime, afin de s’entrainer à l’épée. Le système est basé sur un écran tactile, une carte Raspberry Pi3 et une carte d’acquisitions analogique conçu par Mace Robotics.
La carte d’acquisitions permet de récupérer 5 informations de touches à partir d’un mannequin. Le mannequin est équipé de 5 plaque métallique qui sont connectées à la carte d’acquisitions.
- Conception sous Kicad de la carte
- Développement en langage Python d’une interface utilisateur (utilisation de tkinter)
Si vous avez un projet de réalisation d’un système électronique n’hésitez pas me contacter : contact@macerobotics.com
Bonne journée,
Nicolas
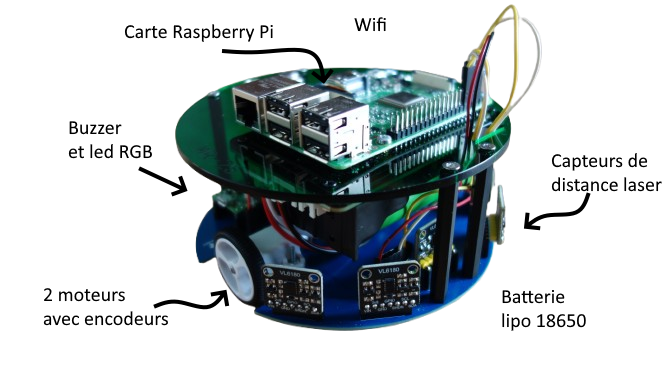
Présentation du robot MR-25
MR-25 est un petit robot mobile basé sur une carte Raspberry Pi. Il est très facile à programmer et personnalisable. Sa petite taille vous permet de facilement le programmer sur une table de bureau.

Ce robot est fabriqué de manière artisanale en Bretagne !
MADE IN FRANCE
Caractéristiques techniques :
- Dimensions :
- Diamètre de 130 mm
- Hauteur : 85 mm
- Compatible avec la carte Raspberry Pi 3, 4, 2W ou 5
- Une Led RGB
- Coprocesseur : Raspberry Pi Pico
- Un buzzer
- Un capteur de courant, mesure tension batterie
- Deux encodeurs magnétiques
- Deux moteurs à courant continu 100 RPM
- 5 capteurs de distances Time-of-Flight VL6180X.
- Batterie : 3 accumulateurs 18650 lithuim
- Un bouton on/off
- Un connecteur de rechargement de la batterie
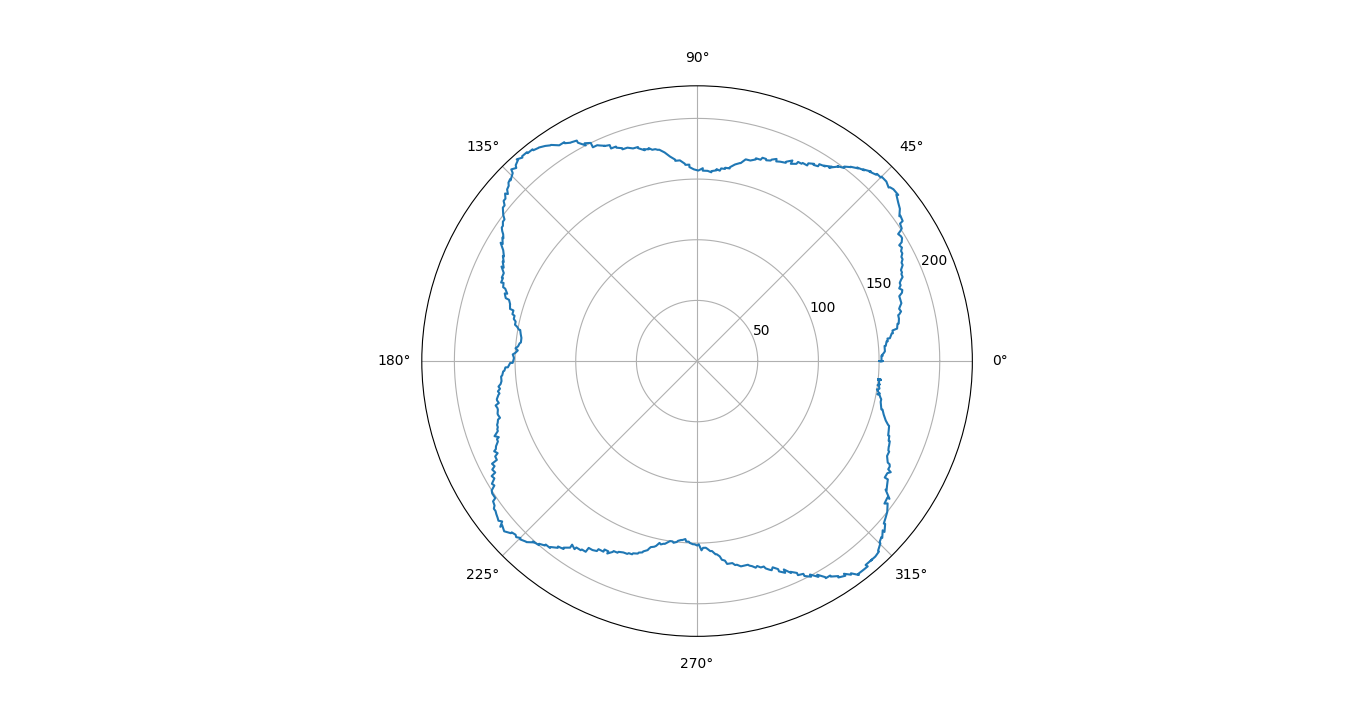
Exemple de création de carte avec les capteurs :
Robot programmable :
Le robot MR-25 est programmable en langage Python3 :
![]()
Traitement d’images
Le robot MR-25 peut être équipé d’une caméra Pi pour faire du traitement d’images avec Open Cv.
![]()
Documentation du robot MR-25
Licences Hardware et Software:
- Logiciel : MIT Licence
- Matériel : CC-BY-SA