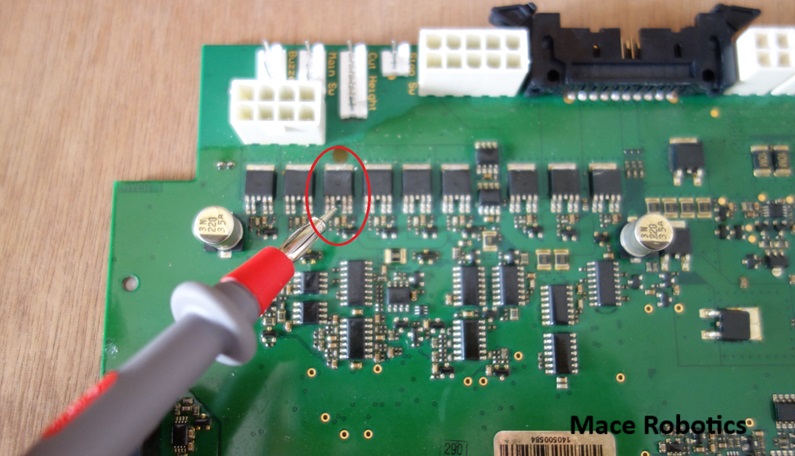
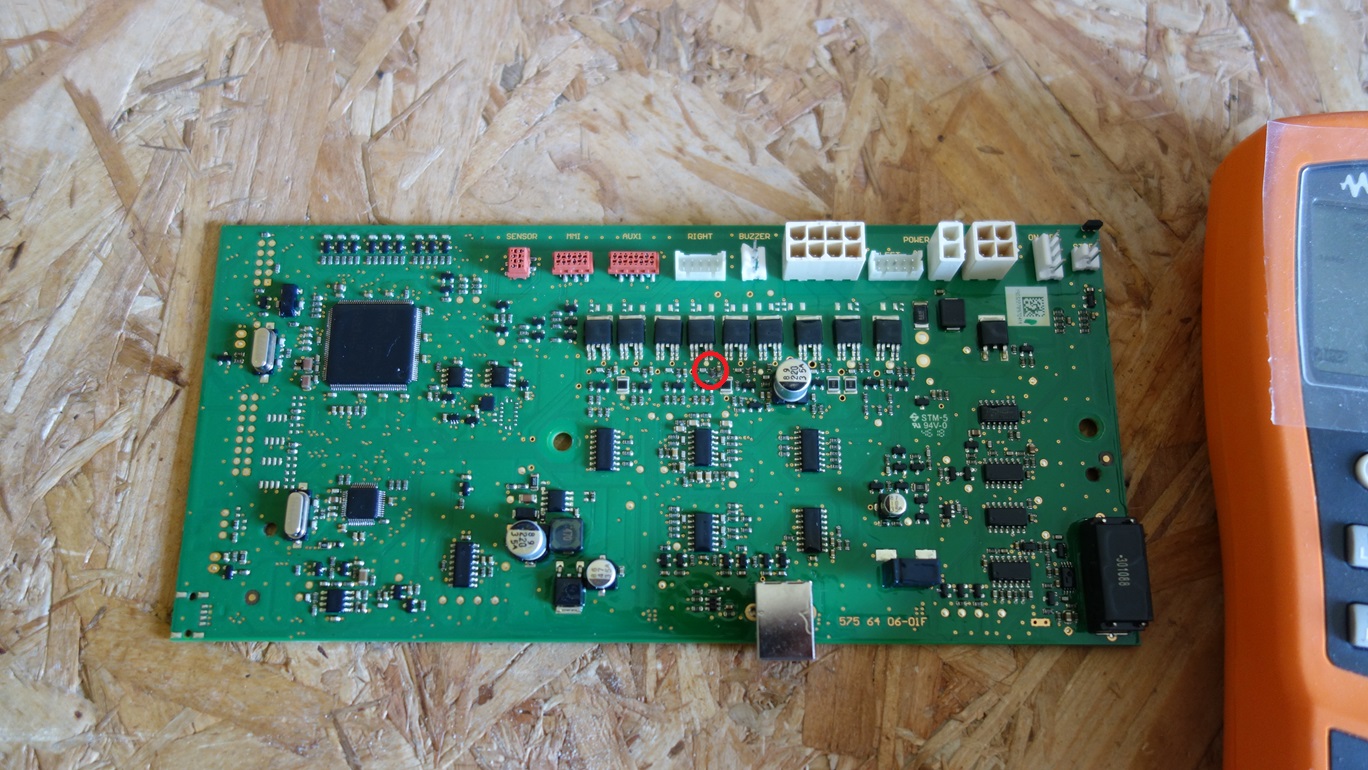
Vous saviez que dans une machine à laver, un robot tondeuse, un lave-vaisselle ou encore dans votre portail automatique, il y a des cartes électroniques ?
Ce sont elles qui pilotent l’appareil, gèrent les cycles, la température, les programmes, etc.
Comme un mini-cerveau, ces cartes électroniques sont essentielles… et malheureusement, lorsqu’elles tombent en panne, on pense souvent qu’il faut remplacer tout l’appareil.
❌ Faux !
✅ Ces cartes peuvent souvent être réparées : condensateurs, relais, soudures,… une réparation ciblée peut redonner vie à votre appareil pour une fraction du coût d’un neuf.
Réparer, c’est bon pour votre portefeuille ET pour la planète.
Si vous êtes dans le secteur de la maintenance, de la réparation ou simplement curieux, pensez à la réparation électronique avant de jeter !
En France, environ 995 000 tonnes de déchets électroniques (DEEE) sont collectées chaque année, soit environ 22 kg par habitant. Ces déchets comprennent les équipements électriques et électroniques comme les smartphones, ordinateurs ou électroménagers. Pour limiter l’impact environnemental (métaux lourds, substances toxiques), il est crucial de favoriser la réparation et le réemploi.
#RéparationÉlectronique #ÉconomieCirculaire #ObsolescenceProgrammée #Maintenance #TechForGood #Electroménager #SAV
Sources : https://www.notre-environnement.gouv.fr/actualites/breves/article/quand-les-dechets-electroniques-atteignent-des-records