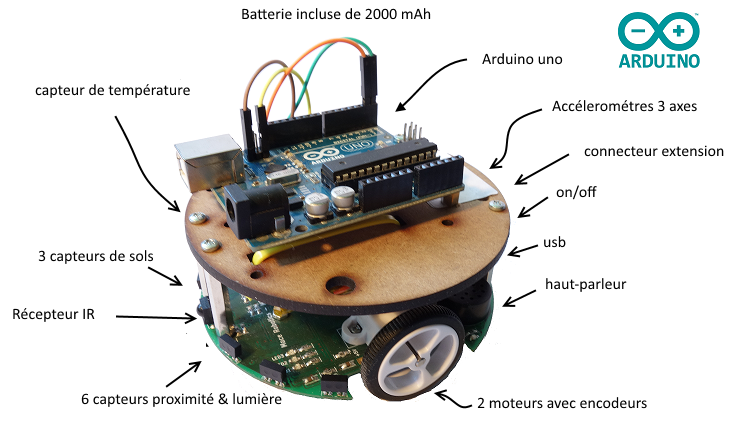
La plateforme MRPi1 avec une carte Arduino Uno :
Voici une petite vidéo du robot contrôlé par l’Arduino :
Le programme réalise sous l’IDE arduino :
// initialisation des variables
int prox_1;
int prox_2;
int prox_3;
int prox_4;
int prox_5;
int prox_6;
int speed = 60;
void setup()
{
// initialisation du port série
Serial.begin(115200);
// Allumer les 3 leds du robot
led(1,1);
led(2,1);
led(3,1);
}
void loop()
{
// Lectures des capteurs de proximité
prox_1 = proxSensor(1);
prox_2 = proxSensor(2);
prox_3 = proxSensor(3);
prox_4 = proxSensor(4);
prox_5 = proxSensor(5);
prox_6 = proxSensor(6);
// Si obstacle à gauche
if(( prox_1 > 500) or (prox_2 > 500))
{
// tourner à droite
turnRight(speed);
}
// Si obstacle à droite
if(( prox_6 > 500) or ( prox_5 > 500))
{
// tourner à gauche
turnLeft(speed);
}
// Si obstacle devant
if(( prox_3 > 500) or ( prox_4 > 500))
{
// tourner à gauche
turnLeft(speed);
}
// si pas d'obstacle
if((prox_1 < 500) and (prox_2 < 500) and (prox_3 < 500) and (prox_4 < 500) and (prox_5 < 500) and (prox_6 < 500))
{
// avancer
forward(speed);
}
}