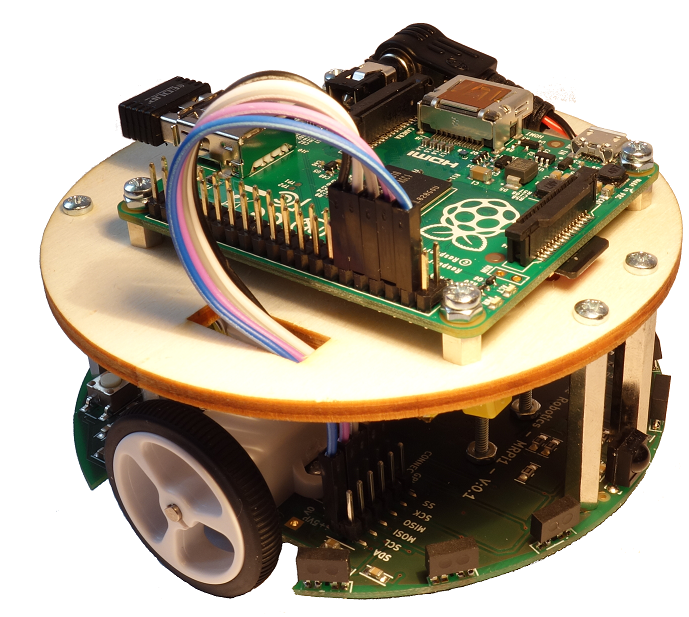
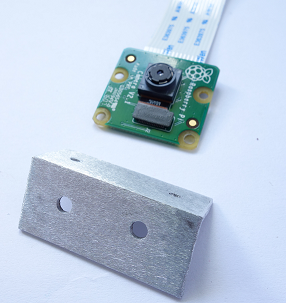
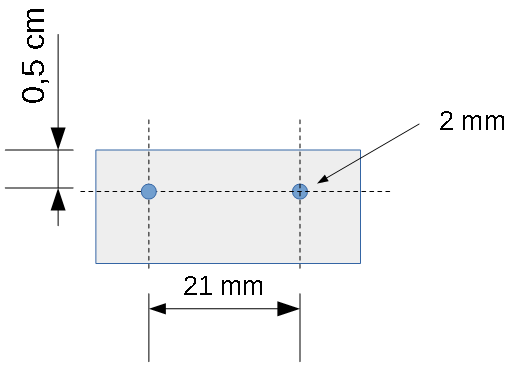
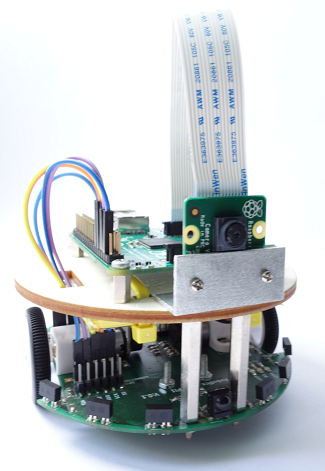
Voici un support de camera Raspberry Pi pour le robot MRPi1.
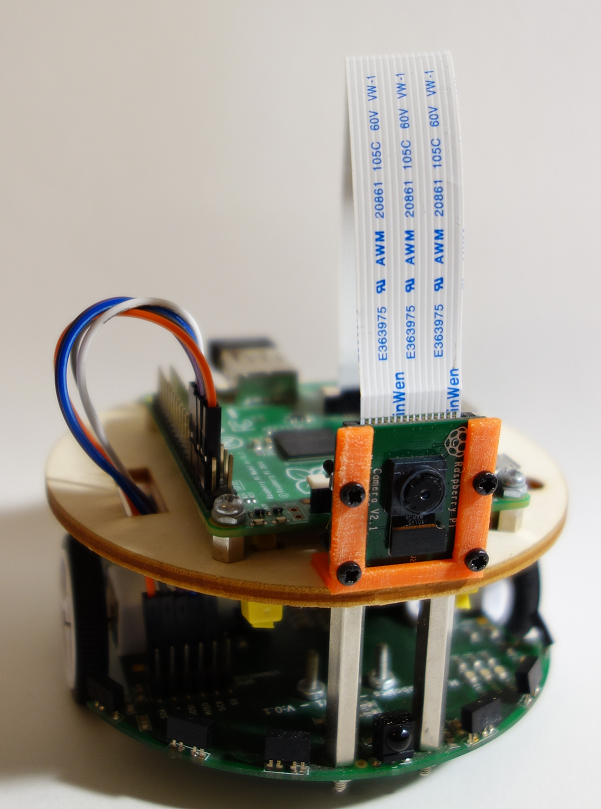
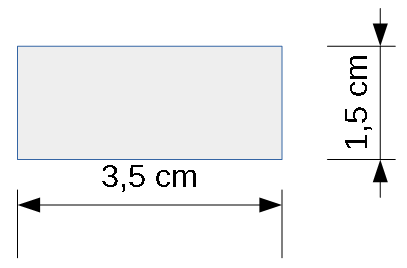
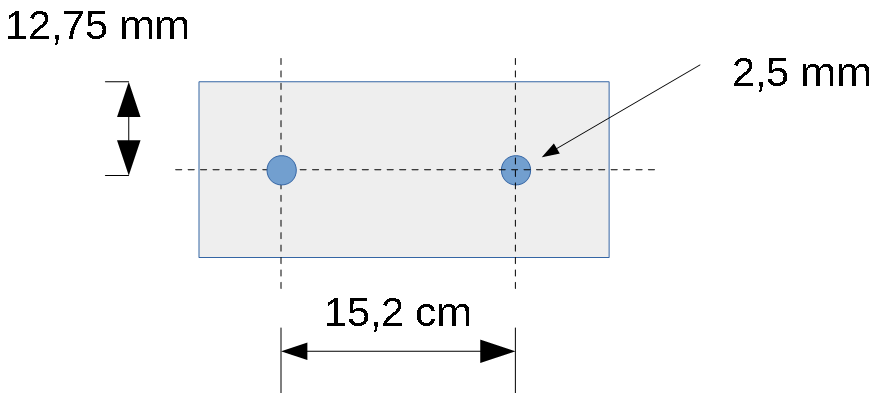
Le support de la camera :
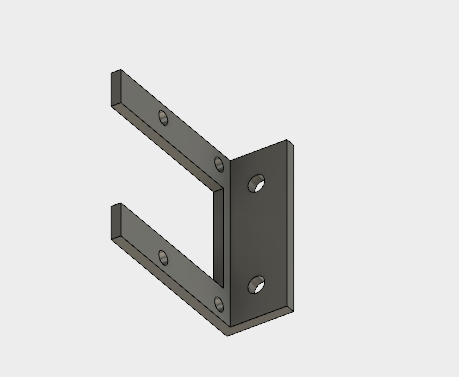
Le fichier STL pour l’impression 3D est sur GitHub : ici.
Voici un support de camera Raspberry Pi pour le robot MRPi1.
Le support de la camera :
Le fichier STL pour l’impression 3D est sur GitHub : ici.
https://youtu.be/2khTwDcWwGw
Le programme :
from mrpi1_lib import * import time obs_limit = 600 # main program state = 1 while 1: x1 = proxSensor(3) x2 = proxSensor(4) if(( x1 > obs_limit)and( x2 > obs_limit)and(state == 1)): x1 = 0 x2 = 0 stop() time.sleep(1) state = 2 controlEnable() turnRight_degree(10,90) forward_mm(10, 100) turnRight_degree(10,90) if(( x1 > obs_limit)and( x2 > obs_limit)and(state == 2)): x1 = 0 x2 = 0 stop() time.sleep(1) state = 2 controlEnable() turnLeft_degree(10,90) forward_mm(10, 100) turnLeft_degree(10,90) state = 1 else: forward(20)
Une mise à jour pour le robot MRPi1 est disponible sur GitHub :
https://github.com/macerobotics/MRPi1
Mise à jour firmware du microcontrôleur
Puis transférer ces fichiers sur le robot avec FileZilla, puis installation la librairie :
>> cd /home/pi/Desktop/MR_Projects/ >> sudo python setup.py install
Les nouvelles fonctions disponibles :
Retourne une valeur en millimètre.
De plus, le déplacement du robot à été améliorer avec les fonctions : forward(), back(), turnLeft(), turnRight().
Pour vérifier la version du firmware avec Python :
>> firmwareVersion() 0.92
Dans ce tutorial vous allez apprendre à programmer le robot MRPi1 en langage C.
https://github.com/macerobotics/MRPi1/tree/master/Software/C
Transférer les fichiers avec FileZilla.
cd /home/pi/Descktop/MR_Projects/C/header
cd /home/pi/Descktop/MR_Projects/C/sources
Voici un petit programme ‘main.c‘ :
#include "MRPi1.h"
int main(int argc, char* argv[])
{
// initialisation du robot MRPi1
init();
printf("Hello MRPi1\n");
// Allumer les leds du robot MRPi1
led(1,1);
led(2,1);
led(3,1);
}
>> cd /home/pi/Desktop/MR_Projects/C >> gcc sources/*.c -I header -o Hello_MRPi1
>> ./Hello_MRPi1
Les 3 leds du robot MRPi1 doivent s’allumer.
Voici un exemple de programme pour gérer les déplacements du robot MRPi1.
#include "MRPi1.h"
int main(int argc, char* argv[])
{
// Initialisation du robot MRPi1
init();
// avancer avec une vitesse de 10% sur une distance de 150 mm
forward_mm(10, 150);
// pause de 2 secondes
sleep(2);
// tourner a droite
turnRight(30);
// pause de 4 secondes
sleep(4);
// arret du robot
stop();
}
Ce petit programme permet :
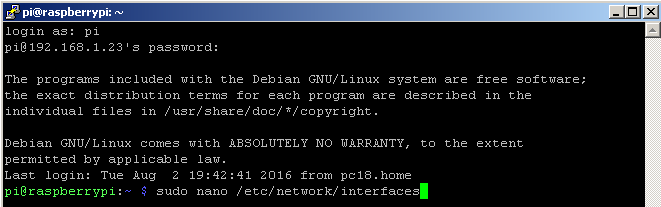
Dans ce tutorial vous allez apprendre à connecter le robot MRPi1 à Internet. Par défaut le robot MRPi1 est configuré en point d’accès, une configuration pour se connecter à votre réseau est donc nécessaire.

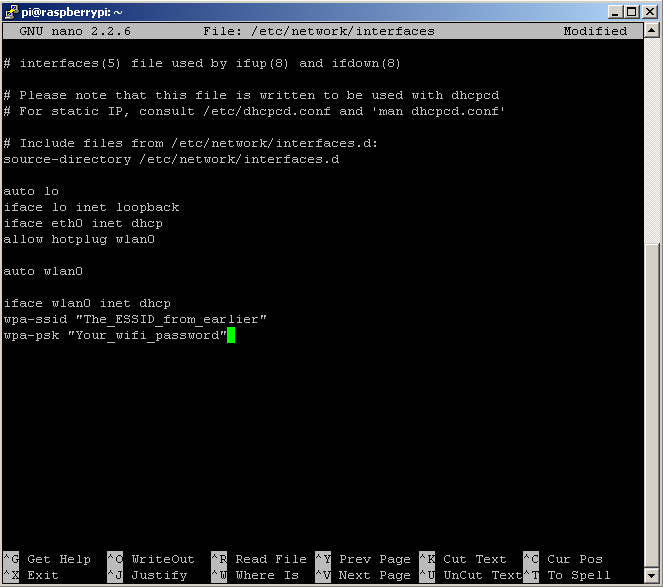
$ sudo nano /etc/network/interfaces
Modifier ce fichier pour qu’il ressemble à ceci :
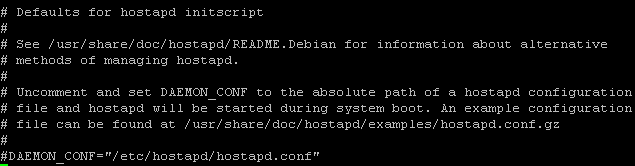
sudo nano /etc/default/hostapd

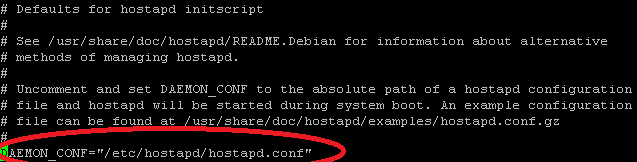
La ligne devient donc :
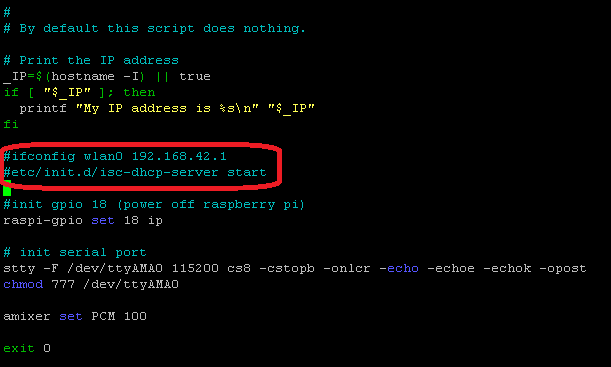
sudo nano /etc/rc.local
<b>ifconfig wlan0 192.168.42.1
etc/init.d/isc-dhcp-server start</b>
Le fichier devient donc :
Maintenant, vous pouvez redémarrer le système pour la prise en compte des modifications :
sudo reboot
Voilà, votre robot peut se connecter à votre box internet. Une adresse IP va lui être affecter automatiquement. Pour connaitre cette adresse pour pouvez utiliser le logiciel Advanced IP Scanner.
Une promotion d’été pour le kit robotique MRPi1 du 25 juillet au 8 aout 2016.
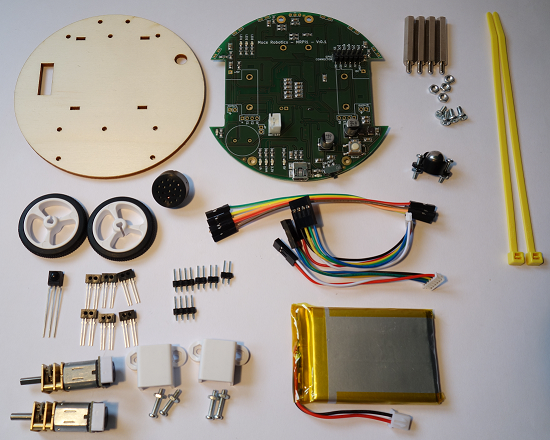
Le kit complet
Ce kit nécessite une carte :
Le robot MRPi1 est équipé d’un accéléromètre 3 axes permettant de détecter les chocs.
Voici une petite vidéo :
Ce programme lit les 3 axes de l’accéléromètre et suivant un seuil d’accélération de 0.1 g une led est allumé ou éteinte.
Le programme python :
from mrpi1_lib import * import time while 1: axeX = acceleroX(); axeY = acceleroY(); axeZ = acceleroZ(); time.sleep(0.01) if(axeX > 0.1): led(1,1) else: led(1,0) if(axeY > 0.1): led(2,1) else: led(2,0) if(axeZ > 0.1): led(3,1) else: led(3,0)