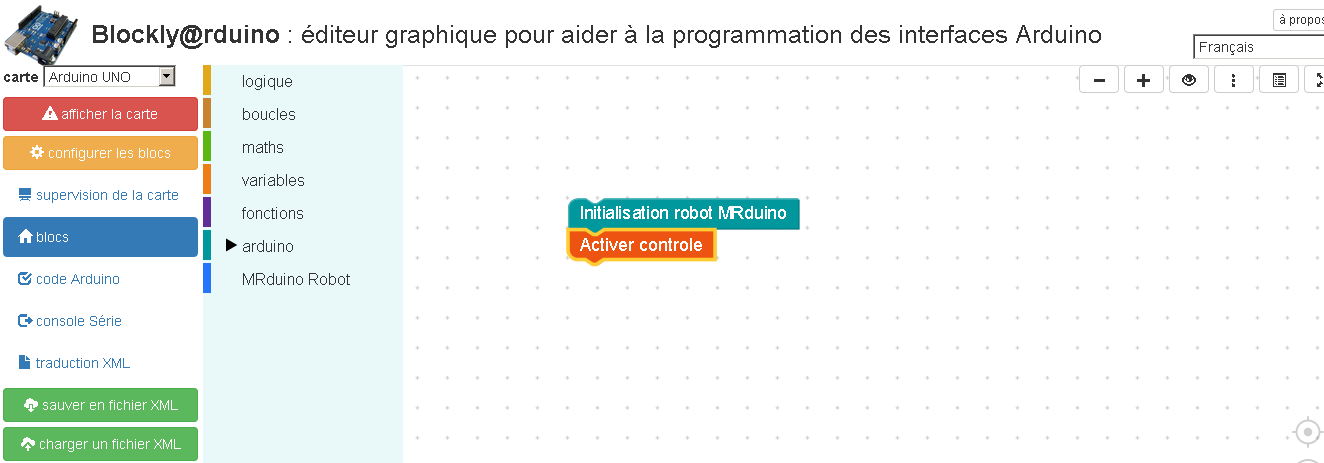
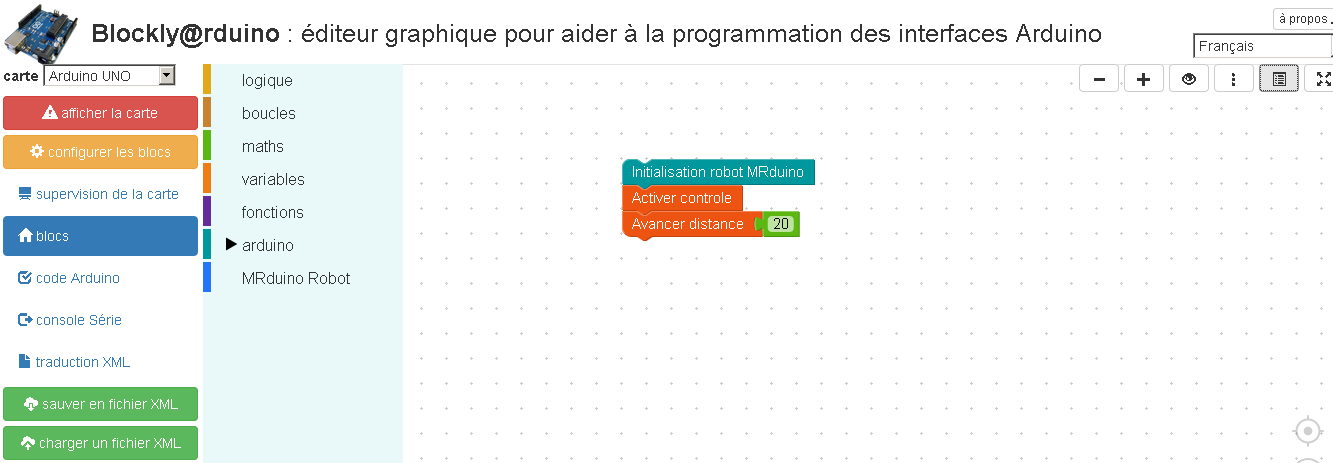
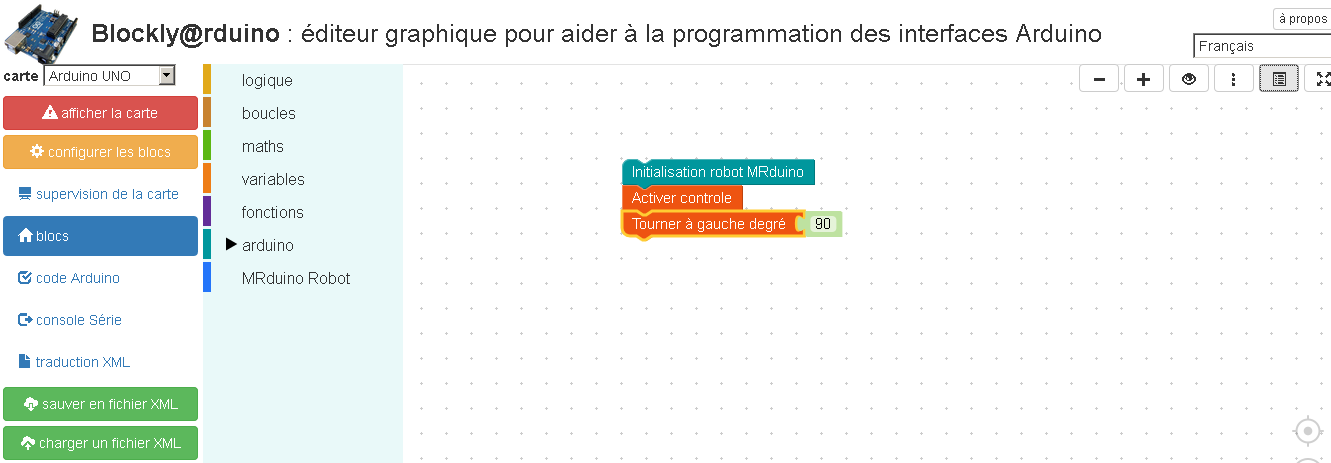
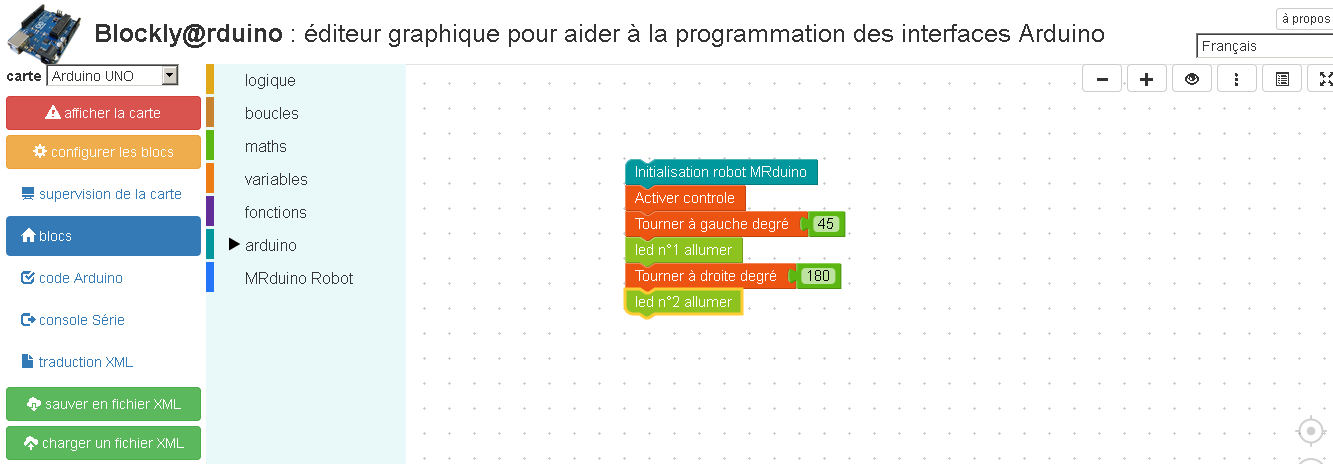
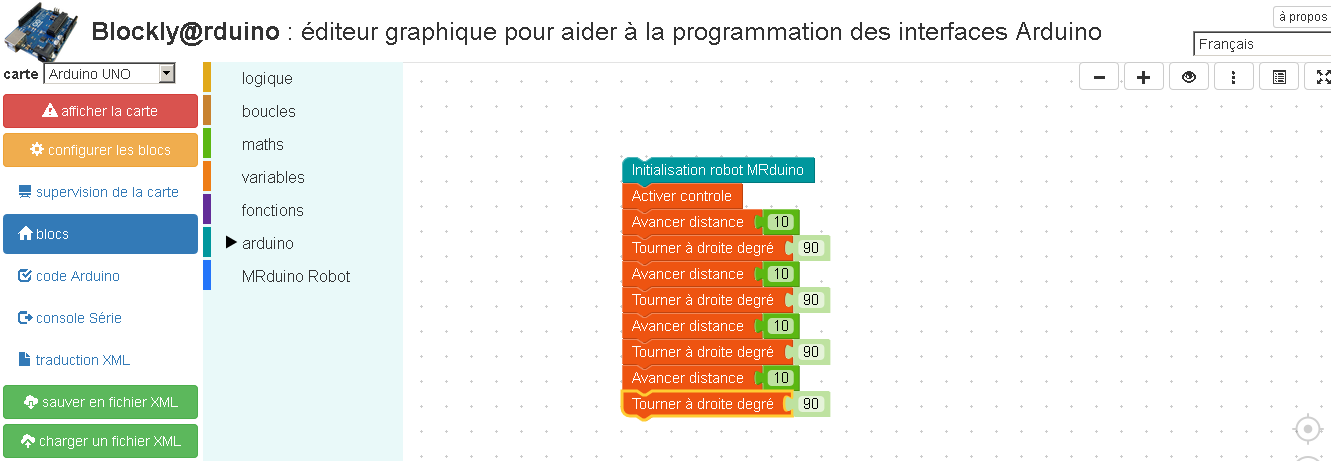
Dans ce tutorial vous allez apprendre à utiliser les 3 capteurs de sols du robot MRduino afin de faire du suivi de ligne.
Les capteurs de sols
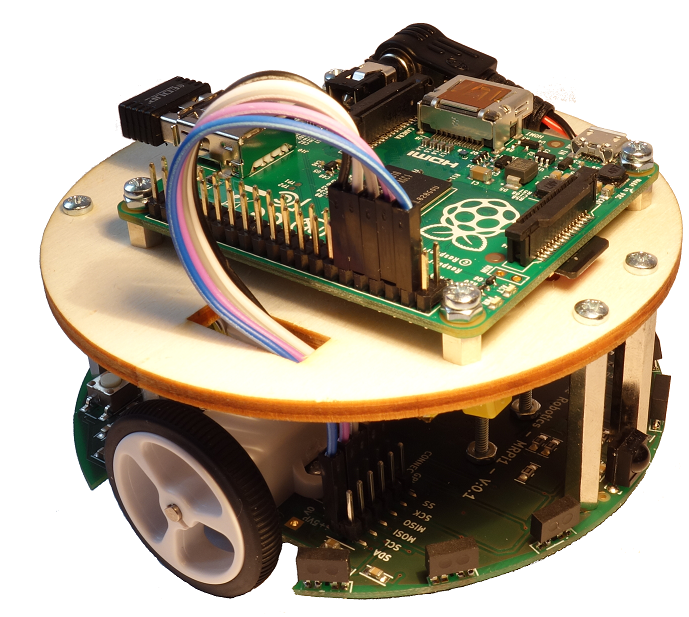
Le robot MRduino est équipé de 3 capteurs de sols, ils sont situés à l’avant.
Lire un capteur
La fonction pour lire le capteur de sol n°1 du robot :
value = groundSensor(1)
- La fonction renvoie une valeur entre 0 et 4095.
Exemple de programme pour lire les 3 capteurs :
#include <mrduino.h>
void setup()
{
Serial.begin(115200);
}
void loop()
{
int capteur1, capteur2, capteur3;
capteur1 = groundSensor(1);
capteur2 = groundSensor(2);
capteur3 = groundSensor(3);
Serial.println(capteur1);
Serial.println(capteur2);
Serial.println(capteur3);
delay(1000);
}