Matériels nécessaire
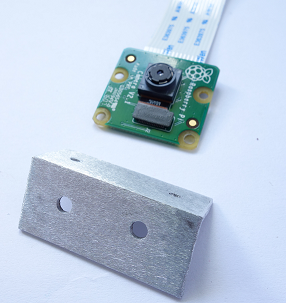
- Robot MRPi1
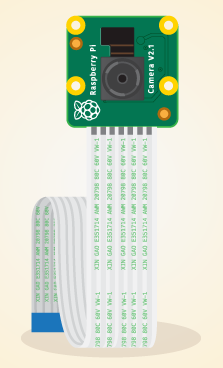
- Camera Pi
- Cornière aluminium 15×15 mm
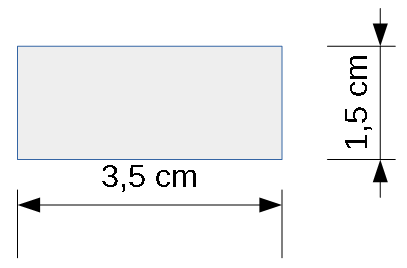
La cornière
- Découper la cornière à une longueur de 35 mm :
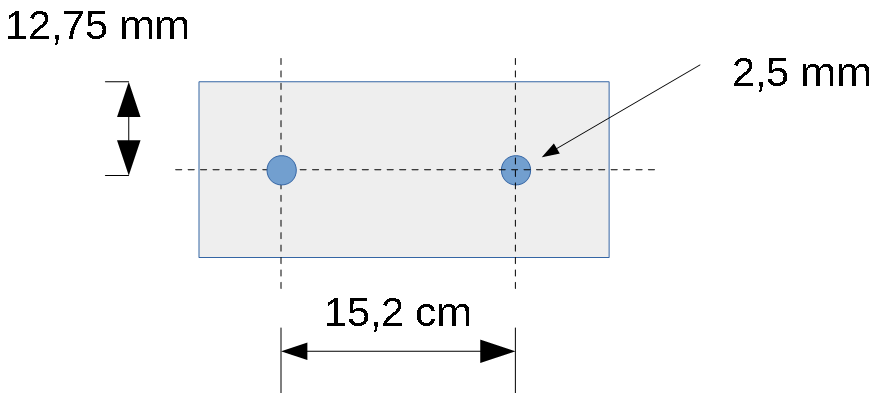
Perçage des trous du support
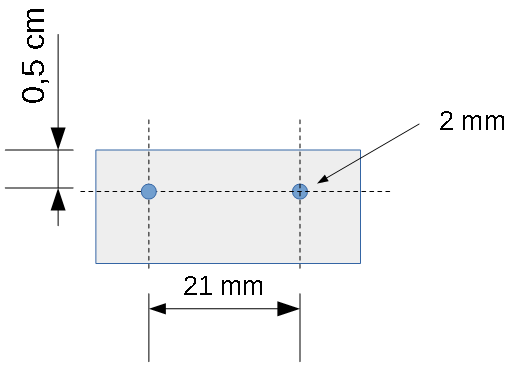
Perçage des trous de la camera Pi
Le support final
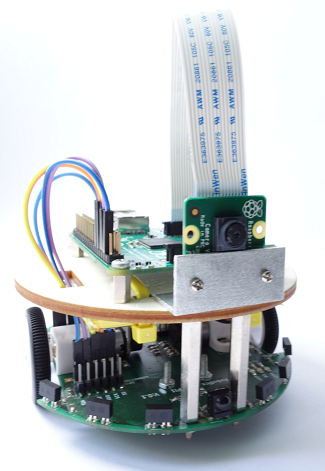
Voici un nouveau tutoriel afin d’installer le module camera V2 de 8 méga pixel sur le robot MRPi1 : installer la camera V2 Pi
The python program :
from mrpi1_lib import * import time #main program state = 1 try: # infinite loop while 1: if state == 2: play("Thank you bye")# speech synthetis state = 3 # read sensors p3 = proxSensor(3) p4 = proxSensor(4) forward(30) print "%d %d" %(p3, p4) if (p3 > 900 or p4 > 900): stop() # stop robot state = 2 playWav("BeCarefull.wav") # play wav file except: stop() exit()
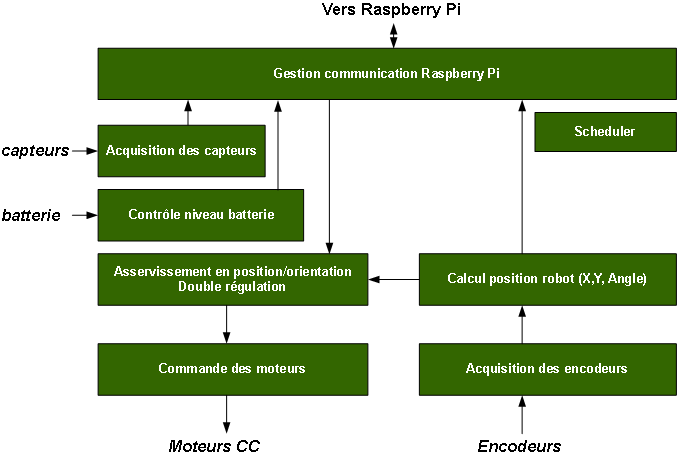
Voici, l’architecture logicielle du microcontrôleur STM32F407 du robot MRPi1 :
The python program :
from mrpi1_lib import *
import time
# activer le controle
controlEnable()
# avancer de 30 cm
forwardC(15, 1200)
# boucle infini
while 1:
# lecture capteur de proximité 3
p = proxSensor(3)
# pause de 0.5 seconde
time.sleep(0.5)
# si capteur > 300
if p > 300:
backC(15,1200) #reculer de 30 cm
exit()
On this video the MRPi1 robot follows a black line autonomously. The 3 ground sensors are used.
Wake up alarm with MRPi1 robot. The robot stops the alarm automaticly when the robot detects the light.
Python program :
# import mrpi1 lib from mrpi1_lib import * import time try: while 1: al1 = ambiantLight(1) # read ambiant light,sensor 1 al2 = ambiantLight(2) al3 = ambiantLight(3) al4 = ambiantLight(4) al5 = ambiantLight(5) al6 = ambiantLight(6) print "Ambiant light = %d %d %d %d %d %d" %(al1, al2, al3, al4, al5, al6) if (al1 < 4000 and al2 < 4000): # light detects print "end alarm" writeCommand("SPD")# disable speaker exit() else: playWav("alarmClock.wav") # play alarm wav file time.sleep(0.2) except: writeCommand("SPD") # disable speaker exit()
Raspberry Pi robot – MRPi1 football from macerobotics on Vimeo.
In this video MRPi1 robot is controled by two PID controller. The PID controller calculates an error values between motors encoders and desired value (orientation and distance).
The speed profile :
Encoders specification :
Raspberry Pi robot – MRPi1 from macerobotics on Vimeo.