Promotion sur le robot MRPiZ version starter de -10% du 30/04/2018 au 14/05/2018.
Boutique : https://shop.macerobotics.com/
Promotion sur le robot MRPiZ version starter de -10% du 30/04/2018 au 14/05/2018.
Boutique : https://shop.macerobotics.com/
Un programme python pour faire avancer le robot MRPiZ vers un but avec la prise en compte des obstacles.
#!/usr/bin/env python # Mace Robotics from mrpiZ_lib import * import time # erreur odometrie error_odo = 20 # sleep 2 secondes time.sleep(2) # but en millimetre goal_robot = 200 # activer controle controlEnable() # lecture du capteur avant sensor_p3 = proxSensor(3) # lecture position du robot (axe X) position_robot = robotPositionX() distance_robot = goal_robot while (position_robot < goal_robot-error_odo): forwardmm(10,distance_robot)# avancer vers le but sensor_p3 = proxSensor(3)# lecture capteur time.sleep(0.2) # pause 200 ms position_robot = robotPositionX()# lecture position robot # si obstacle if (sensor_p3 < 100): stop()# arret du robot distance_robot = goal_robot - position_robot # erreur sur la distance #end
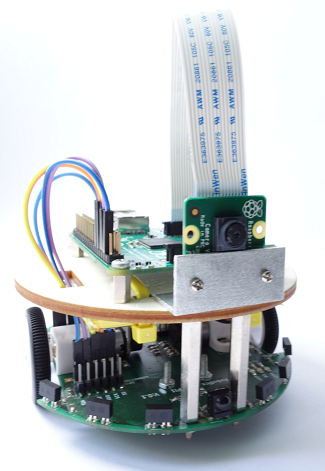
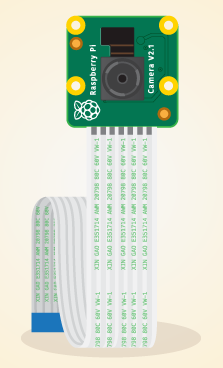
Ce tutoriel permet de faire du traitement d’images avec le robot MRPiZ en langage Python.
![]()
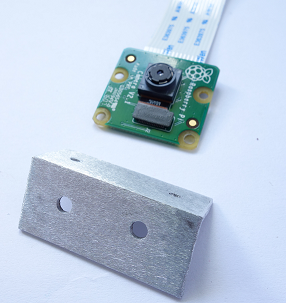
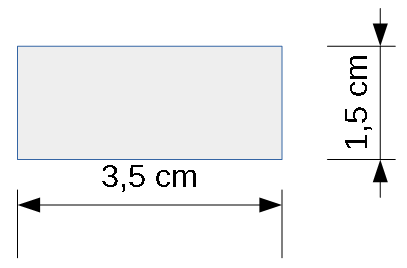
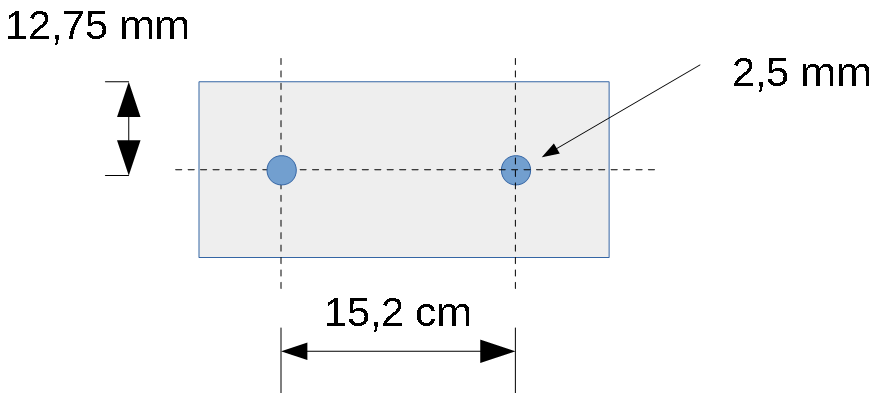
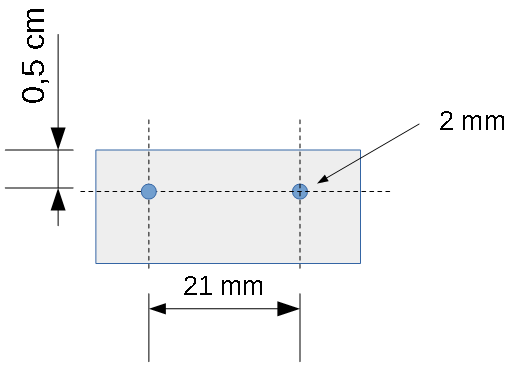
Le matériel nécessaire pour le tutoriel :
La première étape est d’installer la camera sur la carte Raspberry Pi :
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install python-opencv
sudo easy_install pip
sudo pip install imutil
sudo apt-get install python-picamera python3-picamera
Prendre une simple photo avec la camera et l’enregistrer dans une image, voic
#!/usr/bin/python import picamera camera = picamera.PiCamera() # initialisation de la resolution camera.resolution = (1920, 1080) # capture d'une image camera.capture('image.jpg')

Simple photo
Un script pour la lecture d’une image avec OpenCv :
#!/usr/bin/python import picamera import cv2 camera = picamera.PiCamera() # initialisation de la resolution camera.resolution = (100, 100) # capture d'une image camera.capture('image.jpg') image = cv2.read('image.jpg') print image
Conversion colorimétrique.
HSV : Hue Saturation Value
#!/usr/bin/python import picamera import cv2 camera = picamera.PiCamera() # initialisation de la resolution camera.resolution = (1920, 1080) # capture d'une image camera.capture('image.jpg') # lecture de l'image frame = cv2.imread('image.jpg') # conversion RGB en HSV de l'image hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) # enregistrer image hsv cv2.imwrite('image_hsv.png', hsv)
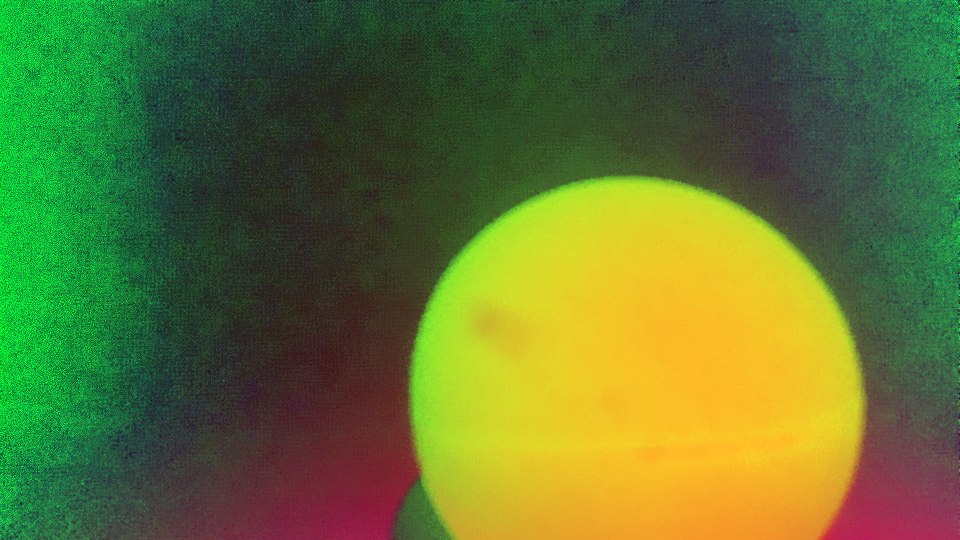
image HSV
Fin de la première partie.
Voici un nouveau tutoriel afin d’installer le module camera V2 de 8 méga pixel sur le robot MRPi1 : installer la camera V2 Pi
Je vous informe que l’entreprise Mace Robotics sera présent le samedi 30 avril à la première rencontre Nationales Raspberry Pi à Nevers.

Information : http://adn.agglo-nevers.net/index.php/rendez-vous/1-premieres-rencontre-nationales-raspberry-pi
The python program :
from mrpi1_lib import * import time #main program state = 1 try: # infinite loop while 1: if state == 2: play("Thank you bye")# speech synthetis state = 3 # read sensors p3 = proxSensor(3) p4 = proxSensor(4) forward(30) print "%d %d" %(p3, p4) if (p3 > 900 or p4 > 900): stop() # stop robot state = 2 playWav("BeCarefull.wav") # play wav file except: stop() exit()
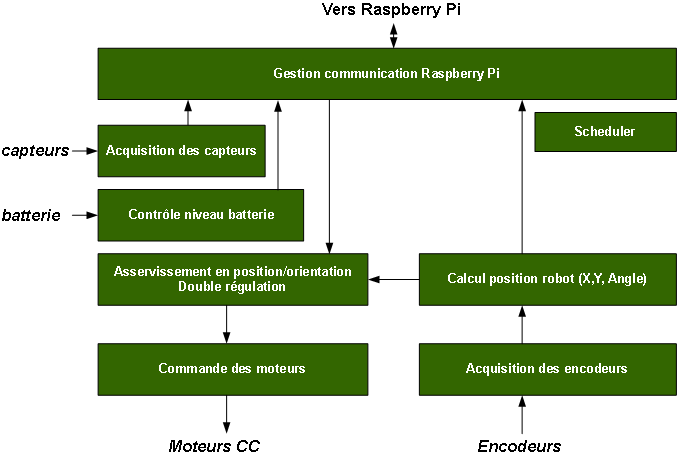
Voici, l’architecture logicielle du microcontrôleur STM32F407 du robot MRPi1 :