Une mise à jour logiciel du robot MR25 pour la calibration des moteurs :
- Mise à jour du firmware du microcontrôleur Raspberry Pico
- Mise à jour de la librairie python
- Mise à jour de la documentation PDF
Calibration des moteurs
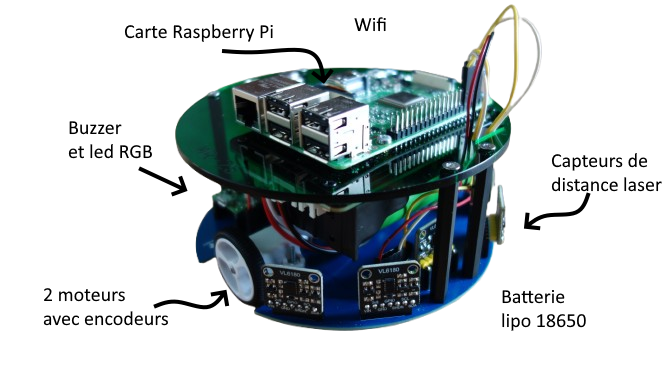
Les deux moteurs du robot MR25 nécessitent une calibration. Car il n’est pas possible de garantir que la vitesse des deux moteurs du robot soit exactement identique. Ainsi, certains robots MR25 ne vont pas totalement droit.
Voir page 21 de la documentation du robot : lien
Lien github :
https://github.com/macerobotics/MR-25