Author: macerobotics
Questionnaire sur le robot MRPi1
Un questionnaire en ligne sur le robot MPRi1 :http://shop.macerobotics.com/
Je vous remercie de votre participation.
Streaming vidéo avec la camera Pi
Nouveau tutoriel pour réaliser du streaming vidéo avec la camera Pi sur la carte Raspberry Pi : http://fr.macerobotics.com/developpeur/tutoriels/streaming-video-avec-la-camera-pi/
Rencontres Nationales Raspberry Pi à Nevers
Je vous informe que l’entreprise Mace Robotics sera présent le samedi 30 avril à la première rencontre Nationales Raspberry Pi à Nevers.

Information : http://adn.agglo-nevers.net/index.php/rendez-vous/1-premieres-rencontre-nationales-raspberry-pi
MRPi1 – Course de robot autonome
Nouvelle vidéo, une course de deux robots MRPi1 complétement autonome :
- Un robot MRPi1 version Raspberry Pi,
- Un robot MRPi1 version Arduino,
Les deux robots sont programmés pour suivre le chemin tous en évitant les obstacles. Le robot MRPi1 version Raspberry Pi est programmer en langage Python et la version arduino en langage arduino.
Voici le programme en langage Python pour le MRPi1 Raspberry Pi :
# importez la librairie du robot MRPi1 from mrpi1_lib import * import time # initialisation de la vitesse speedFast=50 speedSlow=30 # seuil détection obstacle limit_obs = 300 try: while 1: # lecture des capteurs de proximité prox1 = proxSensor(1) prox2 = proxSensor(2) prox3 = proxSensor(3) prox4 = proxSensor(4) prox5 = proxSensor(5) prox6 = proxSensor(6) # si obstacle présent sur tous les capteurs if prox1>limit_obs and prox2>limit_obs and prox3>limit_obs and prox4>limit_obs and prox5>limit_obs and prox6>limit_obs: # tourner à droite turnRight(speedSlow) elif prox4>limit_obs or prox5>limit_obs or prox6>limit_obs: # si obstacle à droite, tourner à gauche turnLeft(speedSlow) elif prox1>limit_obs or prox2>limit_obs or prox3>limit_obs: # si obstacle à gauche, tourner à droite turnRight(speedSlow) else: # sinon avancer forward(speedFast) time.sleep(0.4) except: stop() exit()
Le programme en langage arduino pour le MRPi1 version Arduino :
// librairies du robot MRPi1
#include <mrpi1_arduino.h>
// variables pour les capteurs de proximité
int prox1;
int prox2;
int prox3;
int prox4;
int prox5;
int prox6;
// initialisation de la vitesse
int speed = 60;
// initialisation de seuil des obstacles
int limit_obs = 300;
void setup()
{
// initialisation du port série
Serial.begin(115200);
}
void loop()
{
// lecture des capteurs de proximité
prox1 = proxSensor(1);
prox2 = proxSensor(2);
prox3 = proxSensor(3);
prox4 = proxSensor(4);
prox5 = proxSensor(5);
prox6 = proxSensor(6);
// Si obstacles présent sur tous les capteurs
if((prox1 > limit_obs) and (prox2 > limit_obs)and (prox3 > limit_obs) and (prox4 > limit_obs) and (prox5 > limit_obs) and (prox6 > limit_obs))
{
// reculer
back(speed);
}
else
{
// si obstacle à gauche
if((prox1 > limit_obs) and (prox2 > limit_obs))
{
// tourner à droite
turnRight(speed);
}
else
{
// si obstacle à droite
if((prox6 > limit_obs) or (prox5 > limit_obs) or (prox4 > limit_obs))
{
// tourner à gauche
turnLeft(speed);
}
else
{
// si obstacle à gauche
if((prox1 > limit_obs) or (prox2 > limit_obs) or (prox3 > limit_obs))
{
// tourner à droite
turnRight(speed);
}
else
{
// sinon avancer
forward(speed);
}
}
}
}
}
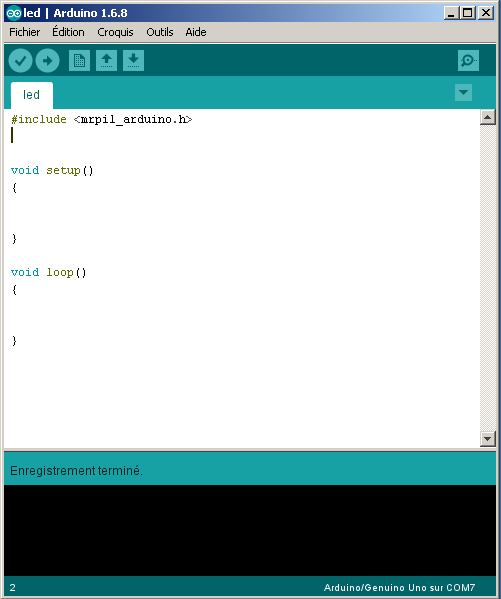
Nouveau tutoriel pour la version MRPi1 Arduino
- Gestion des leds du robot MPRi1 version arduino.
- Utilisation de l’IDE Arduino
http://fr.macerobotics.com/developpeur/tutoriels/gestion-des-leds-version-arduino/
MRPi1 – delivery robot
New video of MRPi1 robot :
- Python program,
- Autonomous robot,
- Control the position with remote control,
The python program :
from mrpi1_lib import *
import time
ir = 0;
state = 0
controlEnable()
while 1:
# read the infrared receiver
ir = irReceiver()
time.sleep(0.2)
if(ir == 1) and (state == 0):
forwardC(10,400)
state = 1
if(ir == 2) and (state == 0):
forwardC(10,800)
state = 2
if(ir == 3) and (state == 0):
forwardC(10,1600)
state = 3
if(ir == 3) and (state == 1):
forwardC(10,1200)
state = 3
if(ir == 3) and (state == 2):
forwardC(10,800)
state = 3
if(ir == 2) and (state == 1):
forwardC(10,400)
state = 2
if(ir == 1) and (state == 2):
backC(10,400)
state = 1
if(ir == 1) and (state == 3):
backC(10,1200)
state = 1
if(ir == 2) and (state == 3):
backC(10,800)
state = 2
if(ir == 0) and (state == 3):
backC(10,1600)
state = 0
if(ir == 0) and (state == 2):
backC(10,800)
state = 0
if(ir == 0) and (state == 1):
backC(10,400)
state = 0
MRPi1 version Arduino
La plateforme MRPi1 avec une carte Arduino Uno :
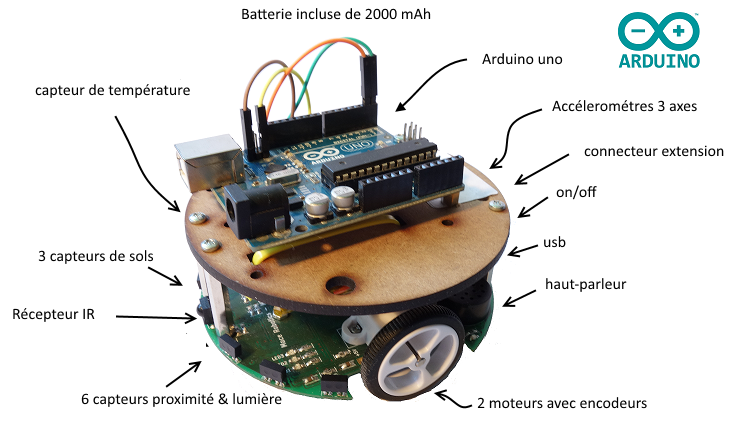
Voici une petite vidéo du robot contrôlé par l’Arduino :
Le programme réalise sous l’IDE arduino :
// initialisation des variables
int prox_1;
int prox_2;
int prox_3;
int prox_4;
int prox_5;
int prox_6;
int speed = 60;
void setup()
{
// initialisation du port série
Serial.begin(115200);
// Allumer les 3 leds du robot
led(1,1);
led(2,1);
led(3,1);
}
void loop()
{
// Lectures des capteurs de proximité
prox_1 = proxSensor(1);
prox_2 = proxSensor(2);
prox_3 = proxSensor(3);
prox_4 = proxSensor(4);
prox_5 = proxSensor(5);
prox_6 = proxSensor(6);
// Si obstacle à gauche
if(( prox_1 > 500) or (prox_2 > 500))
{
// tourner à droite
turnRight(speed);
}
// Si obstacle à droite
if(( prox_6 > 500) or ( prox_5 > 500))
{
// tourner à gauche
turnLeft(speed);
}
// Si obstacle devant
if(( prox_3 > 500) or ( prox_4 > 500))
{
// tourner à gauche
turnLeft(speed);
}
// si pas d'obstacle
if((prox_1 < 500) and (prox_2 < 500) and (prox_3 < 500) and (prox_4 < 500) and (prox_5 < 500) and (prox_6 < 500))
{
// avancer
forward(speed);
}
}
MRPi1 Raspberry Pi robot – Speech synthesis
- Speech synthesis
- Autonomous robot
- Python program
The python program :
from mrpi1_lib import * import time #main program state = 1 try: # infinite loop while 1: if state == 2: play("Thank you bye")# speech synthetis state = 3 # read sensors p3 = proxSensor(3) p4 = proxSensor(4) forward(30) print "%d %d" %(p3, p4) if (p3 > 900 or p4 > 900): stop() # stop robot state = 2 playWav("BeCarefull.wav") # play wav file except: stop() exit()
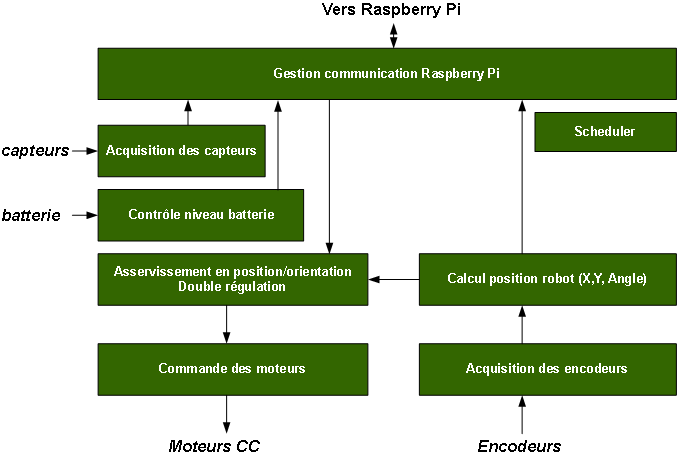
Architecture logicielle du microcontrôleur
Voici, l’architecture logicielle du microcontrôleur STM32F407 du robot MRPi1 :
- Un bloc de la gestion pour la communication série 8 bits vers la carte Raspberry Pi.
- Un bloc scheduler pour la gestion des différentes taches de manière synchrone et en temps réel,
- Un bloc d’acquisition et de traitement des capteurs du robot,
- Un bloc de contrôle du niveau de la tension de la batterie lipo,
- Un bloc d’asservissement du robot en position/orientation avec deux régulateurs numérique de type PID,
- Un bloc de commande des moteurs en signaux PWM,
- Un bloc d’acquisition des encodeurs en quadrature avec deux timers configuré sur les front des signaux,
- Un bloc du calcul de la position du robot sur les axes X et Y puis sur l’orientation du robot.