Une vidéo du robot prototype quadrupède BORVO au salon Tech’inn Vitré :
- Teensys 3.5
- 8 servomoteurs
Une vidéo du robot prototype quadrupède BORVO au salon Tech’inn Vitré :
Mace Robotics presents the new design for the BORVO quadruped robot, with more bio-inspired legs:

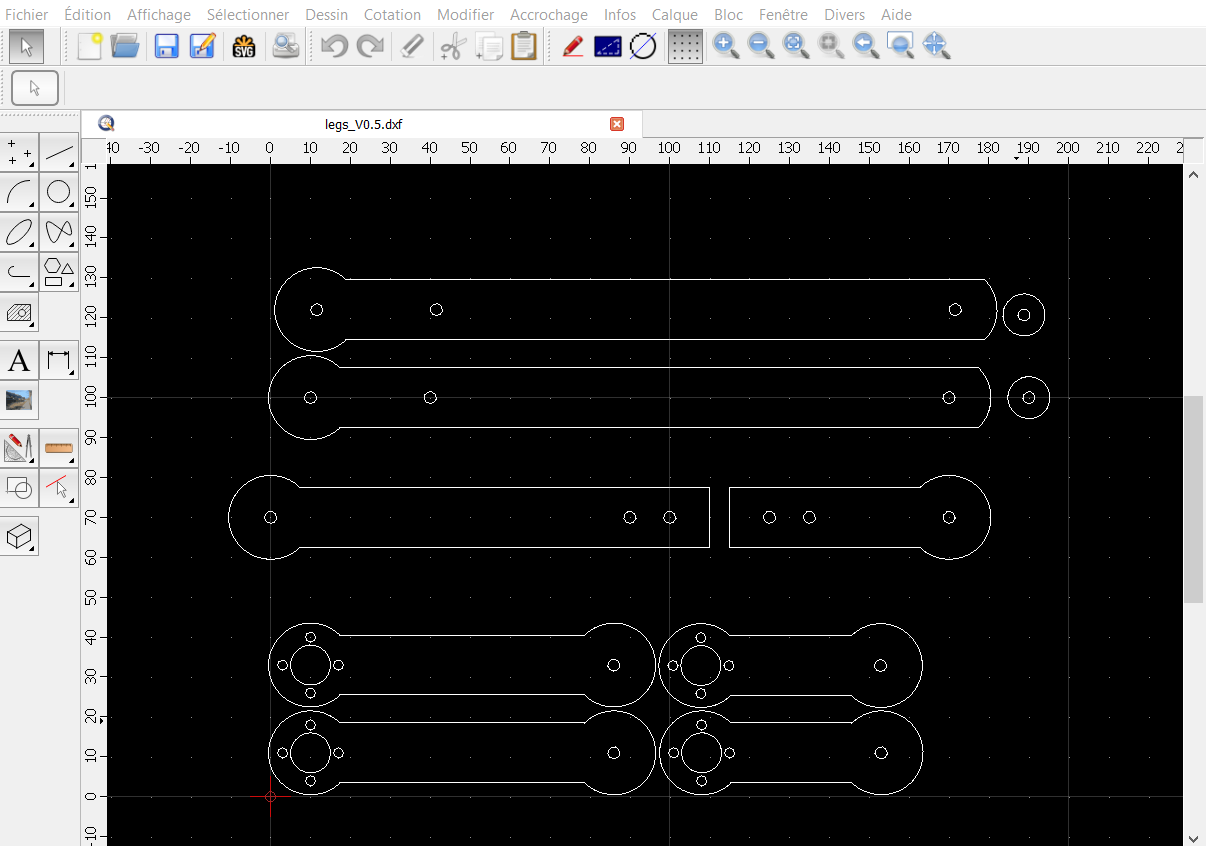
I use 2D CAD software (QCAD) for drawing the legs:
The robot uses 8 JX PDI-6221MG servo motors with a torque of 20 kg. Every leg is equipped with two servomotors with in parallel operation.
I use FreeCAD software to check the reverse kinematics calculations of the legs.

The robot uses a Teensys 3.5 microcontroller to program with Arduino IDE. For the moment, no inertial sensor or foot contacting sensors are used.
New video of the Borvo robot:
Using Inertial sensors for orientation control. The robot use CMPS12 IMU, teensys 3.5, MG91 hobby servos and 2S LiPo battery.