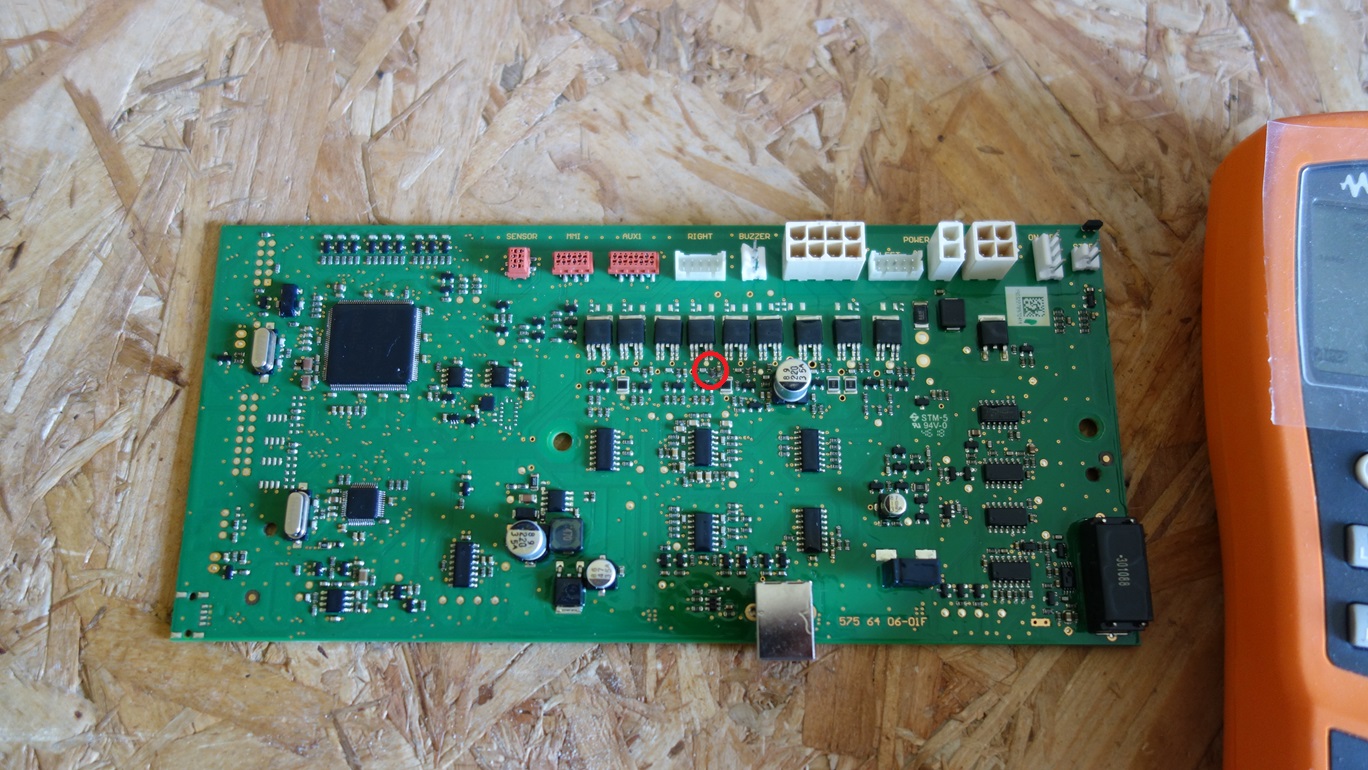
Réparation d’une carte électronique d’un écran compteur d’une moto :


Réparation d’une carte électronique d’un écran compteur d’une moto :
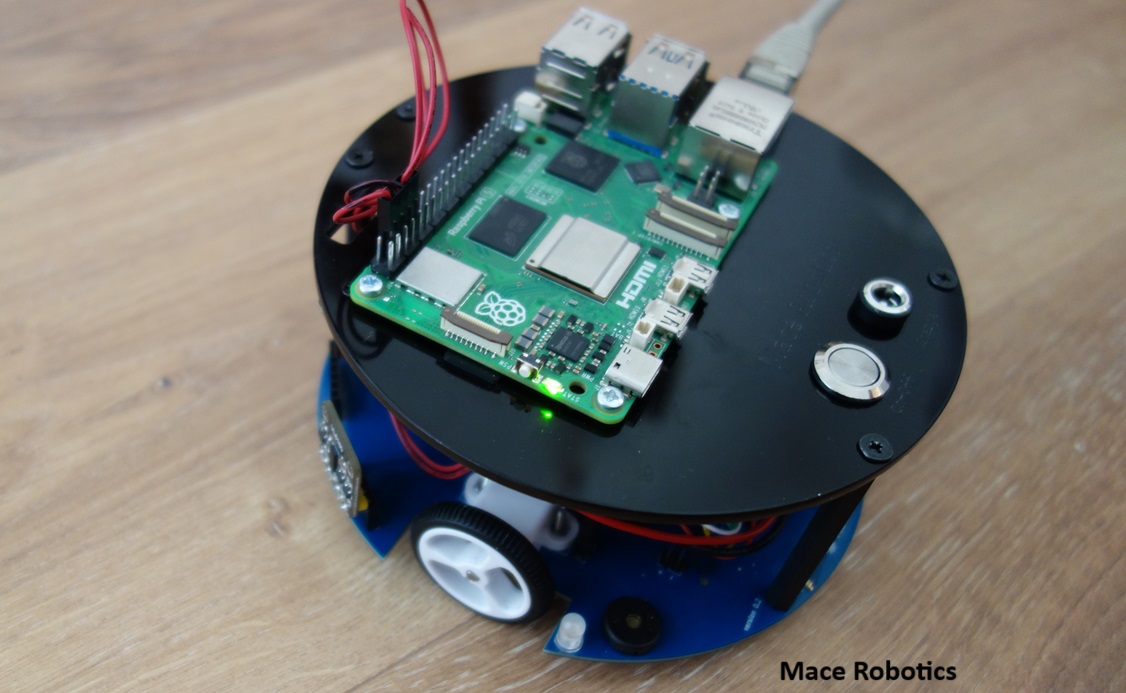
Un nouveau robot mobile basé sur une carte Raspberry Pi sera disponible en septembre 2025 :
-> Robot Open Source
-> Basé sur une carte Raspberry Pi 5 ou 3
-> Buzzer, leds RGB
-> Batterie rechargable
-> 5 capteurs de distance laser
-> Moteurs avec encodeurs
-> µC : Raspberry Pico
-> 130 mm de diamètre
Le robot MR-25 en cours de tests :
A bientôt !
Nicolas
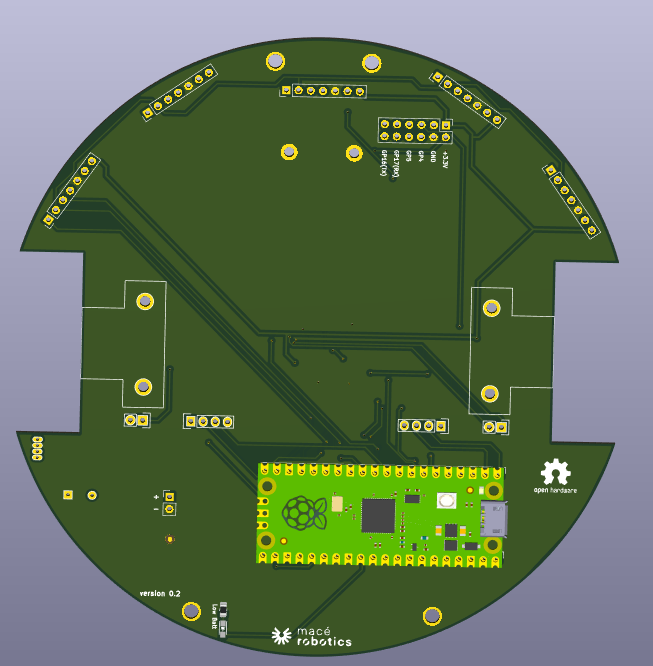
Un nouveau robot est en cours de conception :
Châssis :
Réparation d’une carte de robot tondeuse Husqvarna :
Mace Robotics est sponsor de l’équipe de robotique des apprentis ingénieurs de l’ENSTA Bretagne pour la participation à la coupe de France de robotique. Les participant·e·s doivent concevoir un robot autonome, ce concours est du 28 au 31 mars à la Roche sur Yon.

Site web de l’équipe :
Vous saviez que dans une machine à laver, un robot tondeuse, un lave-vaisselle ou encore dans votre portail automatique, il y a des cartes électroniques ?
Ce sont elles qui pilotent l’appareil, gèrent les cycles, la température, les programmes, etc.
Comme un mini-cerveau, ces cartes électroniques sont essentielles… et malheureusement, lorsqu’elles tombent en panne, on pense souvent qu’il faut remplacer tout l’appareil.
❌ Faux !
✅ Ces cartes peuvent souvent être réparées : condensateurs, relais, soudures,… une réparation ciblée peut redonner vie à votre appareil pour une fraction du coût d’un neuf.
Réparer, c’est bon pour votre portefeuille ET pour la planète.
Si vous êtes dans le secteur de la maintenance, de la réparation ou simplement curieux, pensez à la réparation électronique avant de jeter !
En France, environ 995 000 tonnes de déchets électroniques (DEEE) sont collectées chaque année, soit environ 22 kg par habitant. Ces déchets comprennent les équipements électriques et électroniques comme les smartphones, ordinateurs ou électroménagers. Pour limiter l’impact environnemental (métaux lourds, substances toxiques), il est crucial de favoriser la réparation et le réemploi.
#RéparationÉlectronique #ÉconomieCirculaire #ObsolescenceProgrammée #Maintenance #TechForGood #Electroménager #SAV
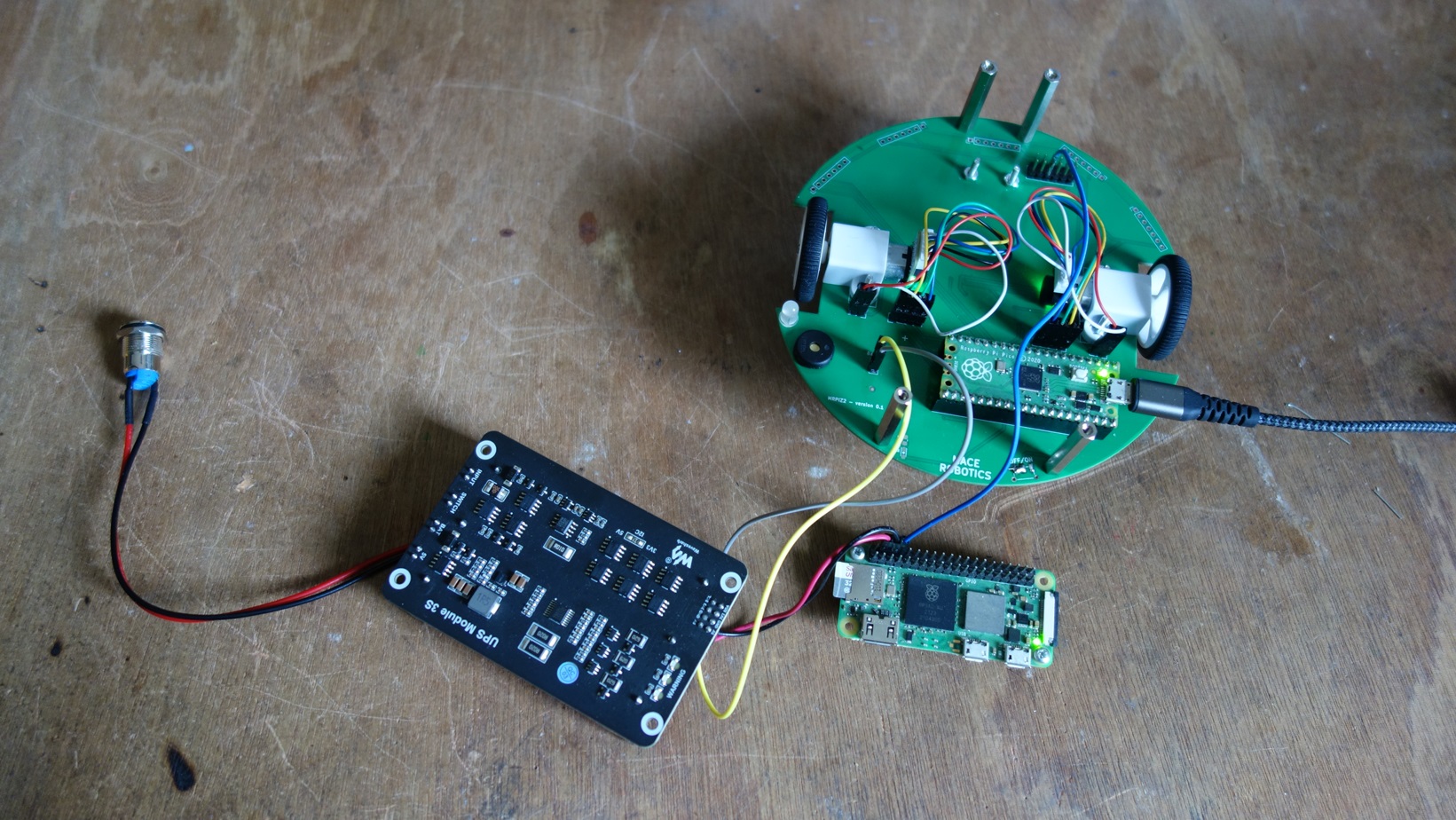
Un nouveau robot open source en phase de test :
Un robot innovant et entièrement open source est actuellement en cours de développement, basé sur la plateforme Raspberry Pi :
Nom du robot : MR-25
Microcontrôleur embarqué : Raspberry Pi Pico
Compatibilité : Raspberry Pi 5, 4, Zero W, etc.
Alimentation : Module UPS 18650 – 5V / 3A
Le MR-25 a été conçu pour offrir une base robuste et évolutive pour des projets en robotique mobile, mêlant puissance de calcul et modularité.
Réparation d’une carte électronique de gestion WC d’un camping-car suite à un problème de commande du ventilateur.

Bientôt, une nouvelle version du robot MRPiZ sera disponible, il sera basé sur une carte Raspberry Pi 5.
Test de la carte Raspberry Pi 5 avec un UPS 3S – 5V – 3A :

