Mace Robotics est maintenant sur Instagram :
https://www.instagram.com/macerobotics/
![]()
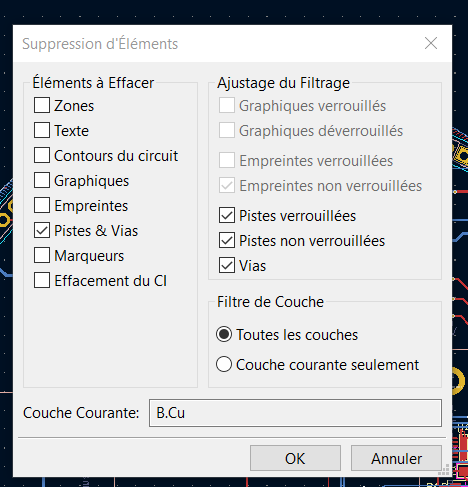
Un petite article pour la suppression de toutes les pistes d’un PCB sous le logiciel Kicad 6.
Editer:
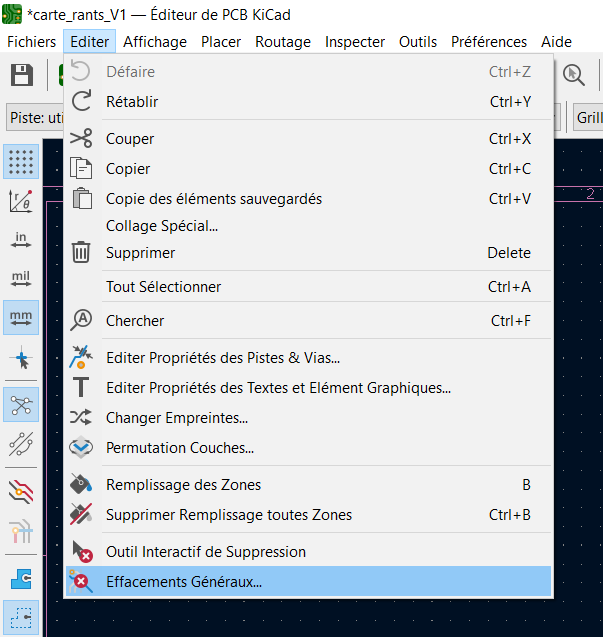
Effacement Généraux :
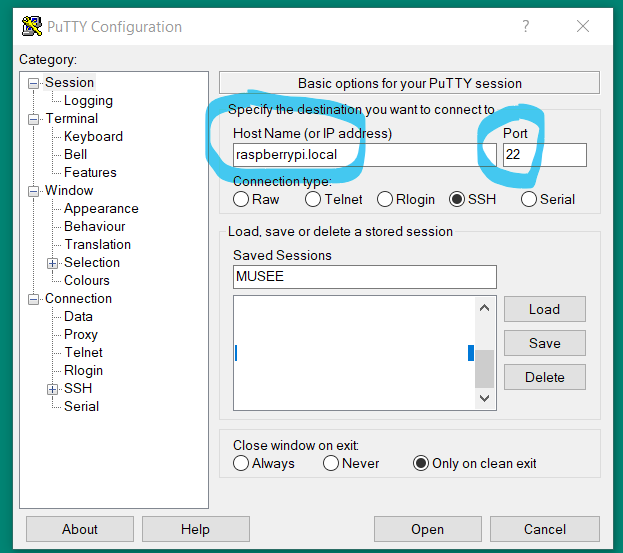
Un article pour présenter une solution pour se connecter en ssh à une carte Raspberry Pi via un câble Ethernet en direct (pas de box internet).
Logiciel nécessaire:
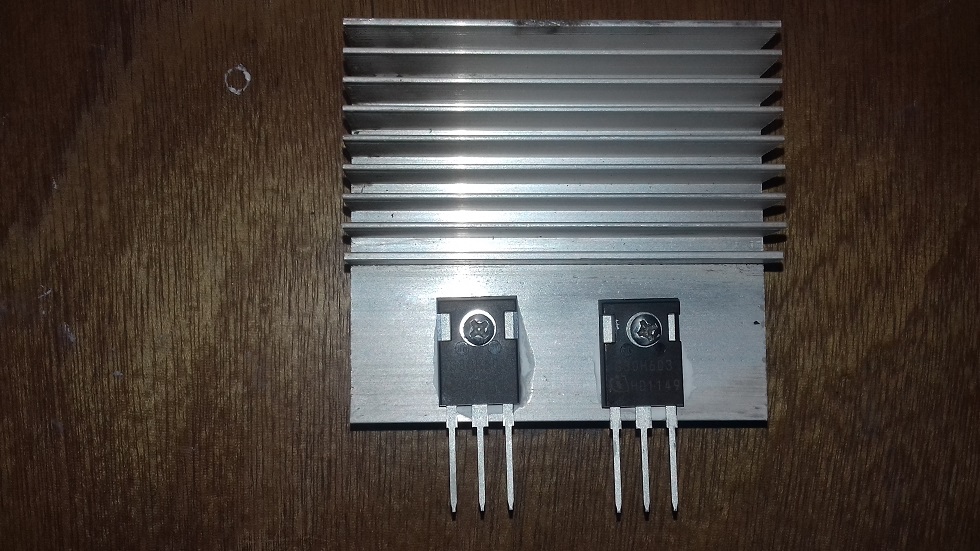
Changement des IGBT d’un poste à souder :
Plus d’informations : https://fr.macerobotics.com/services/
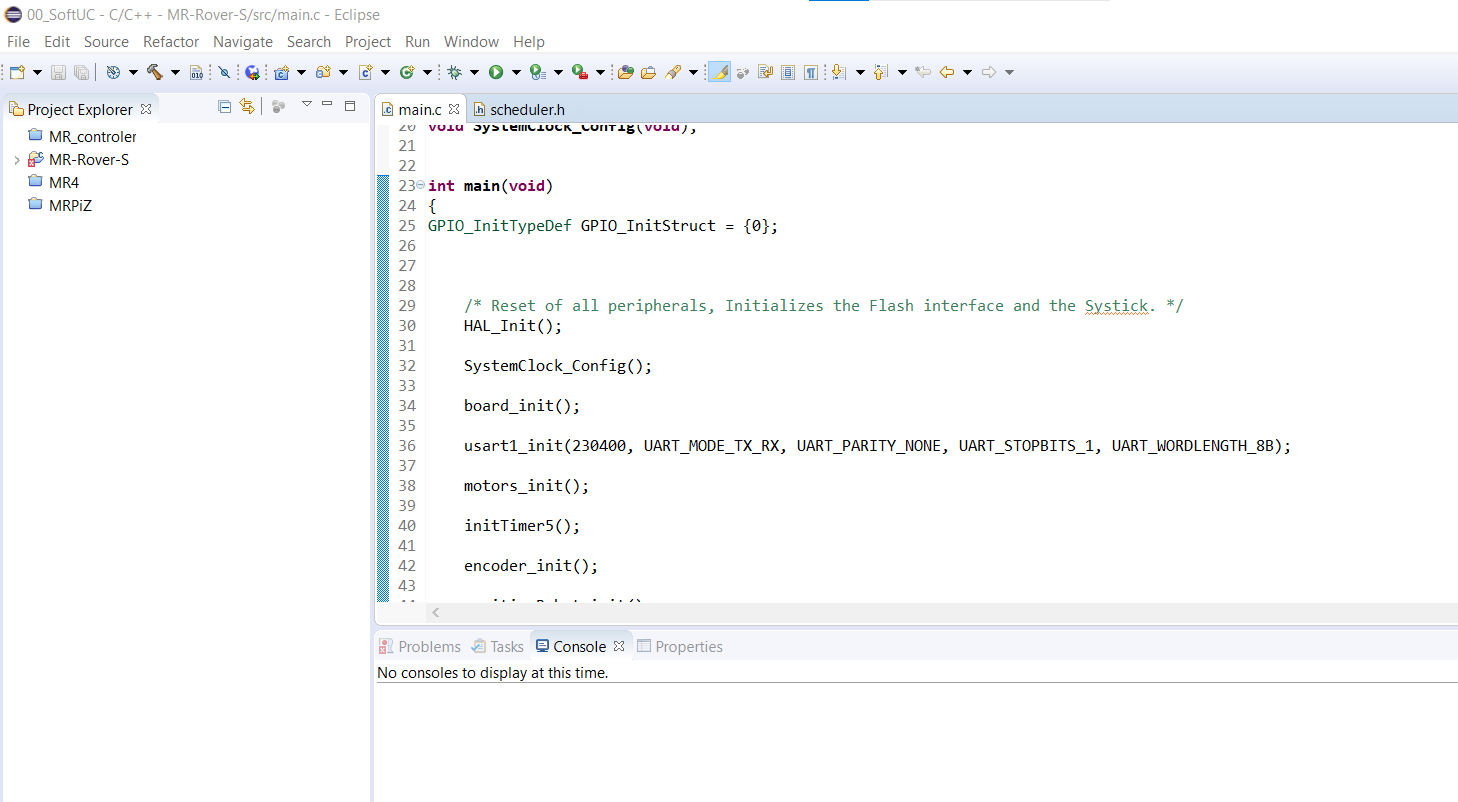
Tests de la carte Romeo BLE Quad avec Eclipse IDE afin de réaliser un robot mobile à 4 roues motrices :
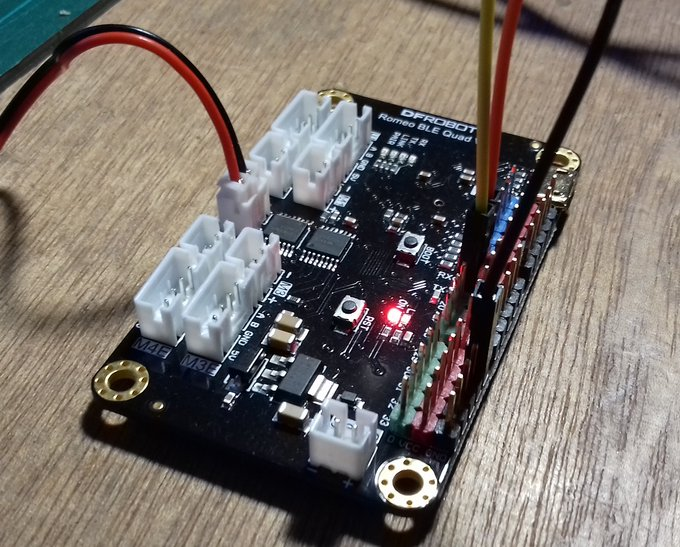
Programmation via Eclipse de la carte :
Une repasse à hirondelle basée sur un système Raspberry Pi, installée près de Rennes :

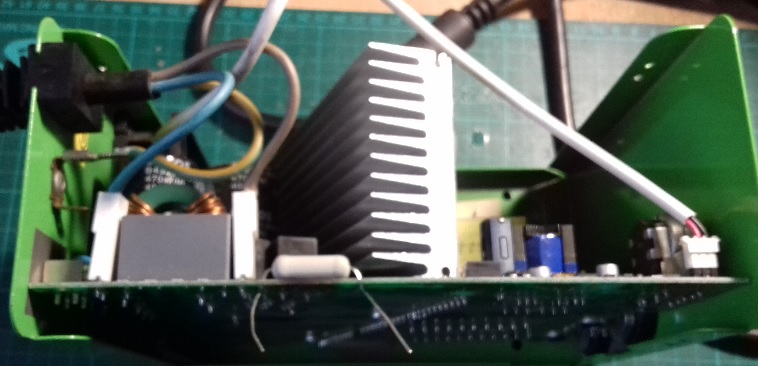
Réparation d’un poste à souder GYS 3200, changement de la de résistance 4.7 Ohm et du contrôleur de l’alimentation flyback NCP1055ST100T3G.
Réparation d’une carte électronique d’un poste à souder Transpocket 1500 de la marque Fronius :
![]()