Un nouveau tutoriel pour le robot MRPiZ :
https://fr.macerobotics.com/developpeur/partie-1-tracking-dune-balle-coloree/
Un nouveau tutoriel pour le robot MRPiZ :
https://fr.macerobotics.com/developpeur/partie-1-tracking-dune-balle-coloree/
Ce tutorial présente l’implémentation d’un suivi de ligne pour le robot mobile MRPiZ.
Deux méthodes sont possibles pour accéder à la caméra:
Il nous faut donc activer v4l:
$ sudo modprobe bcm2835-v4l2
Le fichier complet se trouve dans Software/Python/tutorials/line_follower/line.py.
Warning
Utilisez CTRL+C pour arrêter le robot.
import numpy as np
import cv2
import sys
from mrpiZ_lib import *
# image size
WIDTH = 640
HEIGHT = 480
# turn coeff
COEFF = 0.05
# base robot speed in straight line
SPEED = 30
Pour améliorer les performances, la résolution est réduite à 640 pixels en largeur et 480 en hauteur.
video_capture = cv2.VideoCapture(0)
video_capture.set(3, WIDTH)
video_capture.set(4, HEIGHT)
La boucle principale va fonctionner à l’infini, pour l’arrêter il faudra appuyer sur CTRL+C.
try:
while(True):
Première étape, on commence par capturer une image.
# Capture the frames
ret, frame = video_capture.read()
Voici un exemple d’image capturée:

Pour améliorer les performances, on ne va garder que la partie basse de l’image:
# Crop the image
# Keep the 100 lower pixels
crop_img = frame[379:480, 0:640]

Ensuite on passe l’image en niveaux de gris:
# Convert to grayscale
gray = cv2.cvtColor(crop_img, cv2.COLOR_BGR2GRAY)

Un filtre afin de rendre flou les lignes de l’image est appliqué, il permet de rendre plus efficace les étapes suivantes:
# Gaussian blur
blur = cv2.GaussianBlur(gray,(5,5),0)

Ensuite on va filtrer les parties claires de l’image pour ne garder les parties noires, pour cela, un filtre de seuillage est appliqué:
# Color thresholding
ret,thresh = cv2.threshold(blur,60,255,cv2.THRESH_BINARY_INV)

Ensuite, on va utiliser openCV pour détecter les contours:
# Find the contours of the frame
contours,hierarchy = cv2.findContours(thresh.copy(), 1, cv2.CHAIN_APPROX_NONE)

Il nous faut ensuite extraire la ligne la plus large trouvée afin d’éliminer les fausses détections:
# Find the biggest contour (if detected)
if len(contours) > 0:
c = max(contours, key=cv2.contourArea)
M = cv2.moments(c)
# Skip to avoid div by zero
if int(M['m00']) == 0:
continue
Une fois les contours de la ligne détectée, on calcul le centre de la ligne, c’est la que l’on veut que le robot aille:
# Get the line center
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
Une correction proportionnelle à la différence entre la position de la ligne et le milieu de l’image est calculée. Les moteurs sont ensuite commandés pour ralentir un des moteurs et accélérer l’autre, ceci afin de faire tourner le robot en direction du centre de la ligne.
delta = COEFF * (cx - 320)
motorRight(0, SPEED - delta)
motorLeft(0, SPEED + delta)
Enfin, deux lignes de code permettent d’arrêter le robot quand on appuie sur CTRL+C.
except KeyboardInterrupt:
stop()
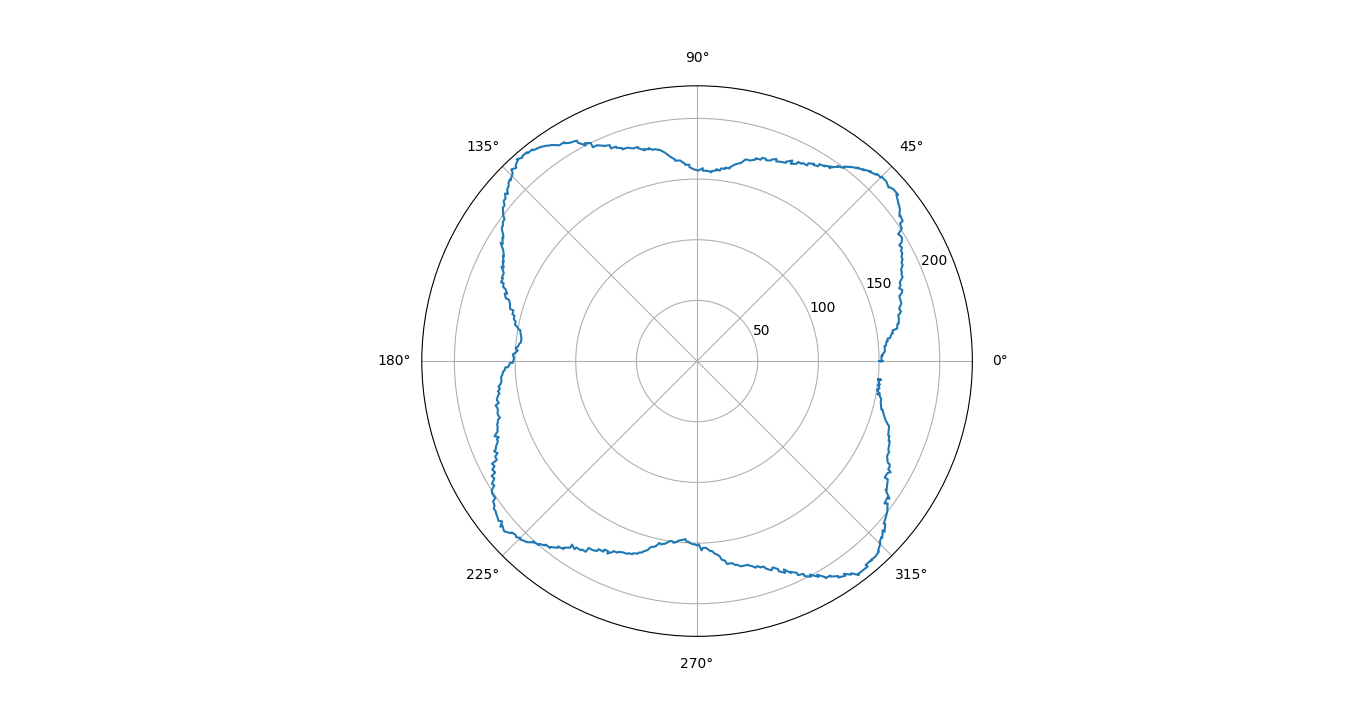
Voici un exemple de création d’une carte avec le robot MRPiZ en utilisant le capteur de distance laser VL53L0X :
from mrpiZ_lib import * import time, csv NameFile = 'carte.csv' def read_laser(): p3_1 = proxSensor(3) p3_2 = proxSensor(3) p3_3 = proxSensor(3) p3_4 = proxSensor(3) p3_5 = proxSensor(3) p3 = (p3_1 + p3_2 + p3_3 + p3_4 + p3_5)/5 return p3 ############################################# MAIN # wait init time.sleep(2) Fichier = open(NameFile,'w') Robot_tourne = 0 # enable asv control controlEnable() while 1: # read laser distance sensor distance = read_laser() # read robot orientation orientation = robotPositionO() # write in file Fichier.write(str(distance)) Fichier.write(";") Fichier.write(str(orientation)) Fichier.write("\r\n")# nouvelle ligne if(Robot_tourne == 0): turnLeftDegree(8,360) Robot_tourne = 1 Fichier.close() exit()
import numpy as np
import math
import matplotlib.pyplot as plt
import numpy as np
import csv
liste_distance = []
liste_orientation = []
fichier = open("carte.csv", "r")
c = 0
# lecture fichier
while True:
ligne = fichier.readline()
if ligne =='':
break # fin fichier
# lecture de la distance (capteur distance)
distance = ligne.split(';')[0]
# lecture orientation
orientation = ligne.split(';')[1]
# correction de la distance par rapport au centre du robot et la position du capteur
distance = float(distance) + 50
# conversion en radian
if float(orientation) > 0:
orientation = (float(orientation)*3.14)/180
liste_distance.append(float(distance))
liste_orientation.append(float(orientation))
c = c + 1
ax = plt.subplot(111, projection='polar')
ax.plot(liste_orientation, liste_distance)
ax.grid(True)
plt.show()
Exemple d’affichage :
Imitation learning exemple with the MRPiZ robot :
The python code :
from mrpiZ_lib import * import time # acquisition frequency TIME_ACQ = 0.1 # acquisition time TEMPS_ACQ = 200 liste_mr = [] liste_ml = [] # main program # record loop c = 0 motorsDisable() time.sleep(1) while c < TEMPS_ACQ: ml = motorLeftSpeed() # read left motor speed mr = motorRightSpeed() # read right motor speed liste_mr.append(mr) liste_ml.append(ml) time.sleep(TIME_ACQ) print ml, mr, c c = c + 1 print "END RECORD -----------" time.sleep(2) c=0 cmd_right=0 cmd_left=0 dir_right = 0 dir_left = 0 # H-bridge enable motorsEnable() ########################################################## # imitation while c < TEMPS_ACQ: if liste_mr[c] >= 0: cmd_right = 2.8*liste_mr[c] dir_right = 0 elif liste_mr[c] < 0: cmd_right = 2.8*liste_mr[c] dir_right = 1 else: dir_right = 0 cmd_right = 0 if liste_ml[c] >= 0: cmd_left = 2.8*liste_ml[c] dir_left = 0 elif liste_ml[c] < 0: cmd_left = 2.8*liste_ml[c] dir_left = 1 else: cmd_left = 0 dir_left = 0 print cmd_left, cmd_right, c c= c + 1 # motors commands motorRight(dir_right,abs(cmd_right)) motorLeft(dir_left,abs(cmd_left)) time.sleep(TIME_ACQ) stop() # end
Promotion sur le robot MRPiZ version starter de -10% du 30/04/2018 au 14/05/2018.
Boutique : https://shop.macerobotics.com/
import sys from mrpiZ_lib import * import time time.sleep(5) controlEnable() forward_mm(10,220) turnLeft_degree(10,90) forward_mm(10,170) turnLeft_degree(10,90) forward_mm(10,170) turnRight_degree(10,90) forward_mm(10,290) turnRight_degree(10,90) forward_mm(10,375) turnRight_degree(10,90) forward_mm(10,450)
La gestion des robots en parallèle est gérer par fabric (www.fabfile.org). Un outil SSH permettant d’envoyer plusieurs commandes SSH en parallèle. Chaques robots MRPiZ est identifié par une adresse IP unique:
Le script de contrôle des robots :
#!/usr/bin/env python
import fabric
from fabric.api import run, env, task
from fabric.api import *
import time
env.hosts = ['192.168.1.41', '192.168.1.37', '192.168.1.47']
env.user = 'pi'
env.password = 'raspberry'
@parallel
def hello():
run('python /home/pi/MRPiZ/Dance.py')
Le script python pour les robots :
#!/usr/bin/env python import sys from mrpiZ_lib import * import time controlEnable() while 1: forward_mm(13,120) back_mm(11,100) forward_mm(11,100) turnRight_degree(25,360) time.sleep(1) turnRight_degree(15,90) turnLeft_degree(15,180) turnRight_degree(15,90) back_mm(12,90)
Dans ce tutorial vous allez apprendre à programmer le robot MRPiZ en langage Java.
![]()
Remarque : le robot MRPiZ doit etre connecté à internet.
sudo apt-get update && sudo apt-get install oracle-java7-jdk
curl -s get.pi4j.com | sudo bash
La librairie java est disponible sur le Github : ici
Voici un exemple de programme (Exemple1.java):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 | import java.io.IOException; import java.util.Date; import java.util.concurrent.TimeUnit; public class Exemple1 { /****************/ public static void main(String args[]) throws InterruptedException, IOException { float tension_batterie; float distance_sensor1; float distance_sensor2; MRPiZ robot = new MRPiZ(); // Lecture de la tension de la batterie tension_batterie = robot.proxSensor(1); System.out.println("Batterie = " + tension_batterie); // avancer le robot pendant 1 seconde robot.forward(30); TimeUnit.SECONDS.sleep(2); // reculer le robot pendant 1 seconde robot.back(30); TimeUnit.SECONDS.sleep(2); // tourner à droite robot.turnRight(30); TimeUnit.SECONDS.sleep(1); // arret du robot robot.stop(); // Lecture du capteur de proximitè n°1 et n°2 distance_sensor1 = robot.proxSensor(1); distance_sensor2 = robot.proxSensor(2); // afficher les valeurs System.out.println("Sensor 1 = " + distance_sensor1); System.out.println("Sensor 2 = " + distance_sensor2); } } |
javac -classpath .:classes:/opt/pi4j/lib/'*' -d . Exemple1.java
sudo java -classpath .:classes:/opt/pi4j/lib/'*' Exemple1
Article pour la configuration de la communication Wifi de la carte Pi Zero W en ligne de commande.
Version Raspian : April 2017 (Raspian Jessie Lite)
sudo nano /etc/wpa_supplicant/wpa_supplicant.conf
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
country=GB
network={
ssid="YOUR_SSID"
psk="YOUR_PASSWORD"
key_mgmt=WPA-PSK
}
sudo reboot
https://youtu.be/2khTwDcWwGw
Le programme :
from mrpi1_lib import * import time obs_limit = 600 # main program state = 1 while 1: x1 = proxSensor(3) x2 = proxSensor(4) if(( x1 > obs_limit)and( x2 > obs_limit)and(state == 1)): x1 = 0 x2 = 0 stop() time.sleep(1) state = 2 controlEnable() turnRight_degree(10,90) forward_mm(10, 100) turnRight_degree(10,90) if(( x1 > obs_limit)and( x2 > obs_limit)and(state == 2)): x1 = 0 x2 = 0 stop() time.sleep(1) state = 2 controlEnable() turnLeft_degree(10,90) forward_mm(10, 100) turnLeft_degree(10,90) state = 1 else: forward(20)