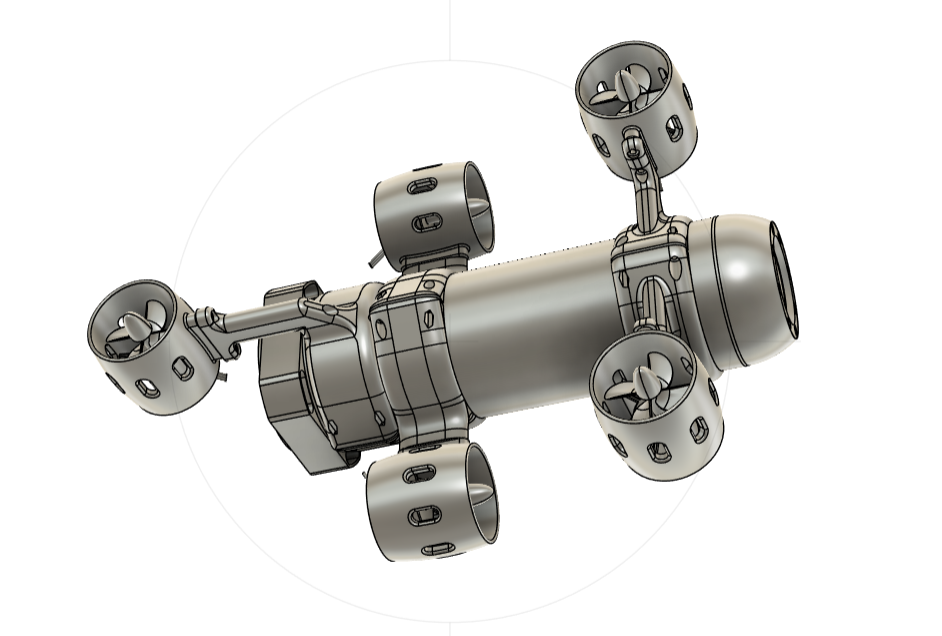
Le Robot MR-25 est fabriqué en Bretagne !
Un nouveau robot Open Source est en cours de conception, bientôt plus d’informations !
Nicolas
Diagnostic d’une carte électronique de commande d’essuie glace WSF02 d’un camping car :

Service de Réparation de carte électronique :
![]()
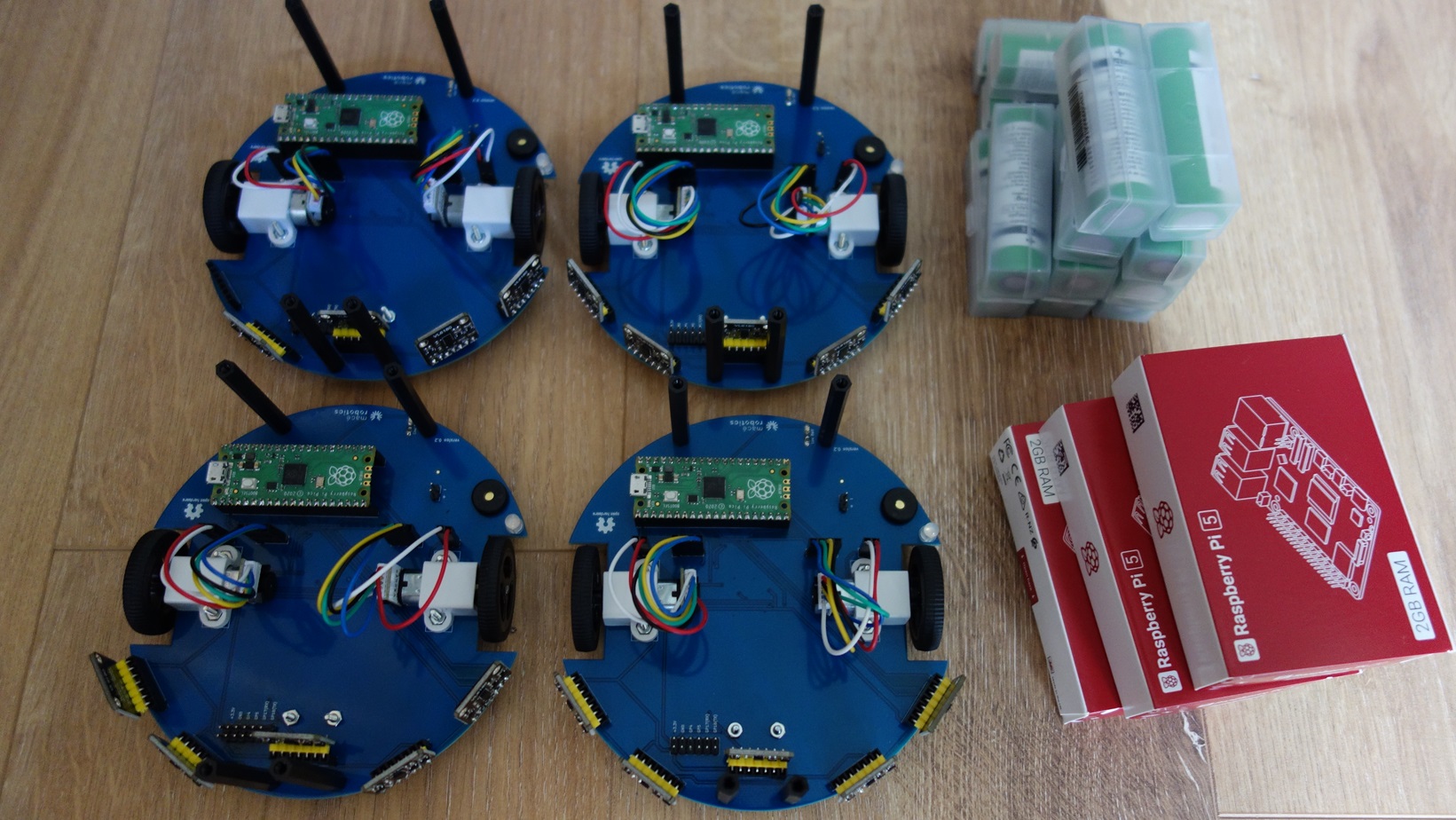
Bonne nouvelle ! Après plusieurs mois d’attente, le tout nouveau robot mobile basé sur la Raspberry Pi 5 est enfin arrivé en boutique.
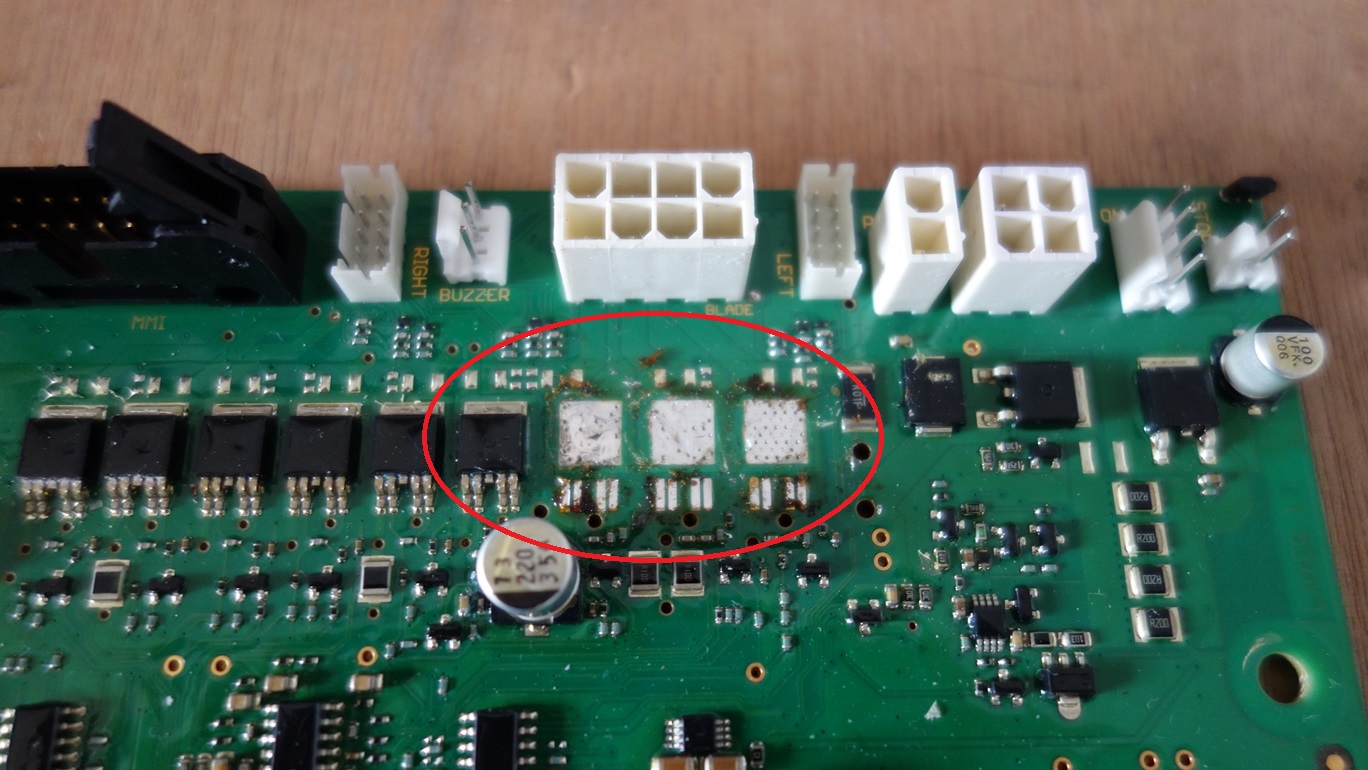
Aujourd’hui, on s’attaque encore à une réparation d’une carte mère d’un robot tondeuse !
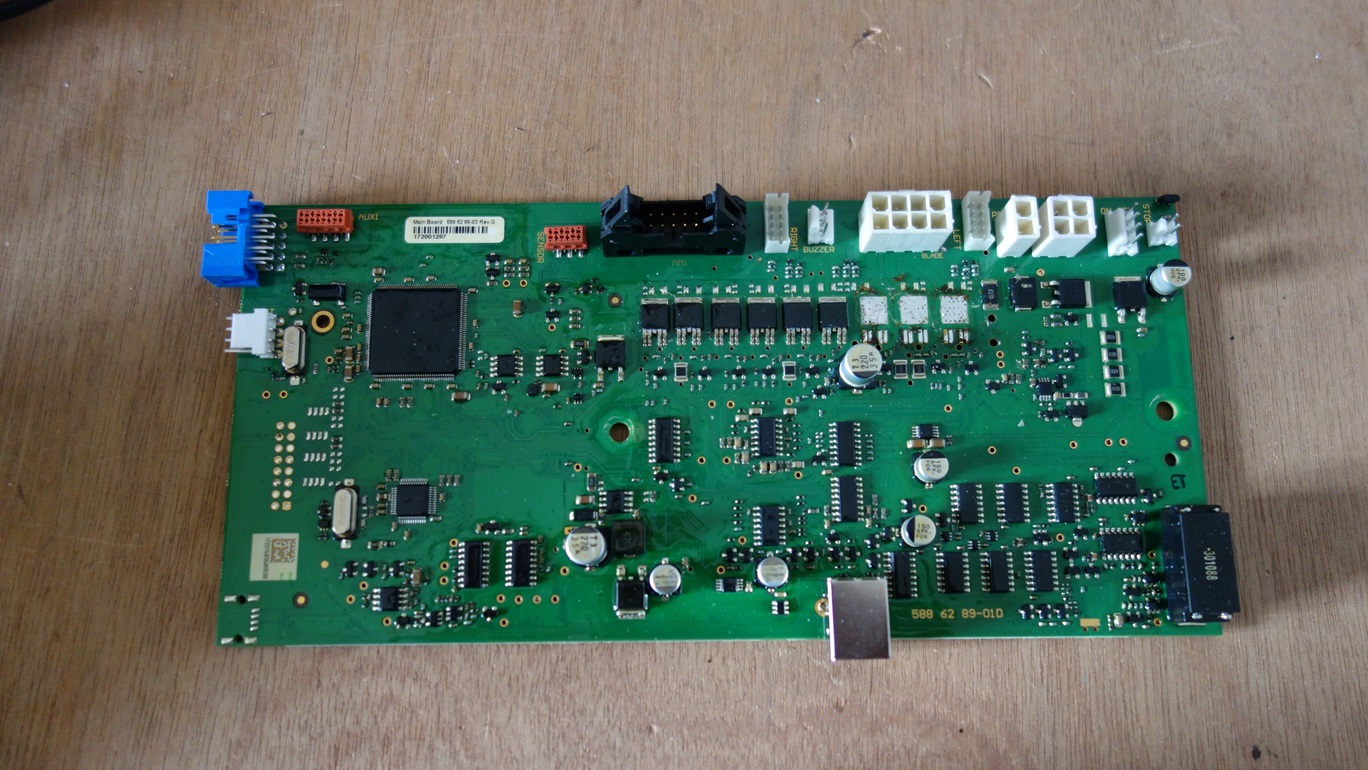
Le moteur de coupe est un moteur brushless commandé par 6 transistors Mosfet (Canal N & P).
Il faut donc remplacé ces transistors que je viens de déssouder :
La réparation de cartes électroniques nécessite des outils spécifiques pour diagnostiquer, dessouder, ressouder, nettoyer et tester les composants.

Travaillez toujours dans un environnement bien éclairé et bien ventilé.
Gardez des cartes électroniques HS pour récupérer des composants.
Ayez un bon schéma de la carte si disponible (ou dessinez-le vous-même au fur et à mesure).
https://www.digikey.fr/fr/resources/conversion-calculators/conversion-calculator-resistor-color-code
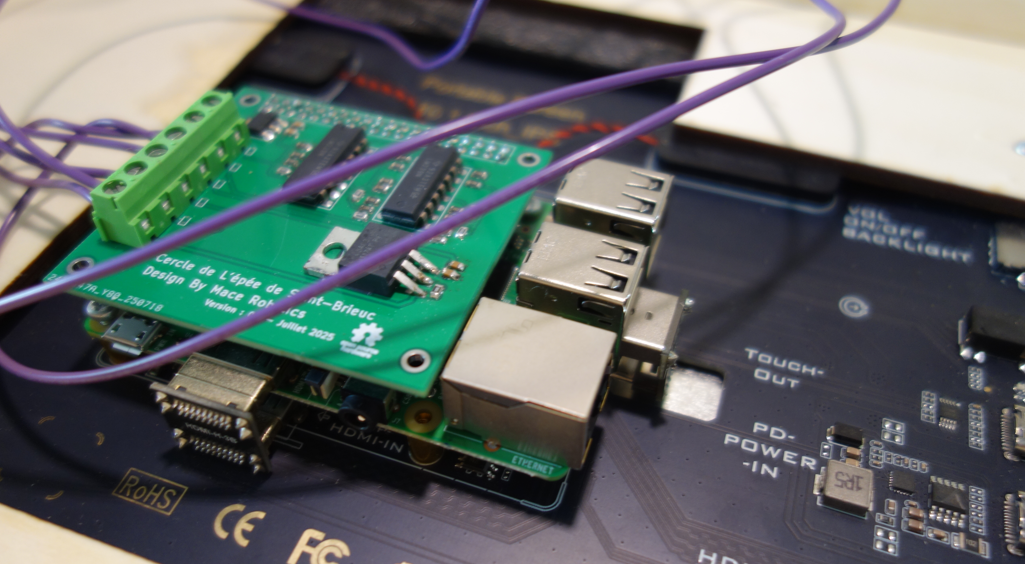
Conception en cours d’un système électronique pour un club d’escrime, afin de s’entrainer à l’épée. Le système est basé sur un écran tactile, une carte Raspberry Pi3 et une carte d’acquisitions analogique conçu par Mace Robotics.
La carte d’acquisitions permet de récupérer 5 informations de touches à partir d’un mannequin. Le mannequin est équipé de 5 plaque métallique qui sont connectées à la carte d’acquisitions.
Si vous avez un projet de réalisation d’un système électronique n’hésitez pas me contacter : contact@macerobotics.com
Bonne journée,
Nicolas
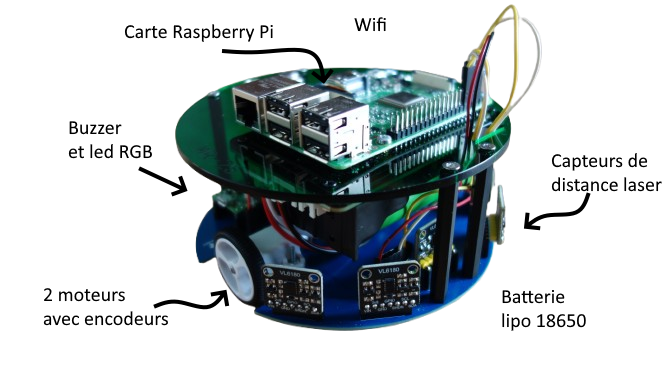
MR-25 est un petit robot mobile basé sur une carte Raspberry Pi. Il est très facile à programmer et personnalisable. Sa petite taille vous permet de facilement le programmer sur une table de bureau.

Ce robot est fabriqué de manière artisanale en Bretagne !
Exemple de création de carte avec les capteurs :
Le robot MR-25 est programmable en langage Python3 :
![]()
Le robot MR-25 peut être équipé d’une caméra Pi pour faire du traitement d’images avec Open Cv.
![]()
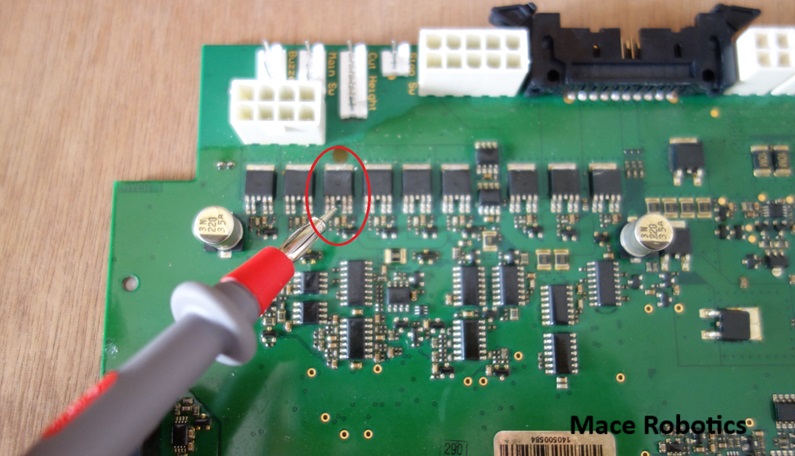
Aujourd’hui, on s’attaque à une nouvelle mission, encore une réparation d’une carte mère d’un robot tondeuse en cours …
Après un diagnostic minutieux, j’ai vérifié le pont triphasé de la commande du moteur brushless. Il s’avère qu’un transistor Mosfet du pont est défectueux. Il y a un court-circuit entre le drain et la source du mosfet. La pièce concernée est un transistor de référence AOD609, qui nécessite un remplacement pour restaurer la fonctionnalité du moteur.
Nous procédons donc au remplacement de ce composant pour remettre le robot en parfait état de fonctionnement.
N’hésitez pas à nous contacter pour une réparation.