Voici un petit tutoriel pour utiliser le logiciel Putty en mode série.
Putty est un logiciel client SSH, telnet et peut aussi servir de terminal de liaison série sous Windows. Je l’utilise pour débugger des cartes électroniques avec une liaison USB-série (FT232).
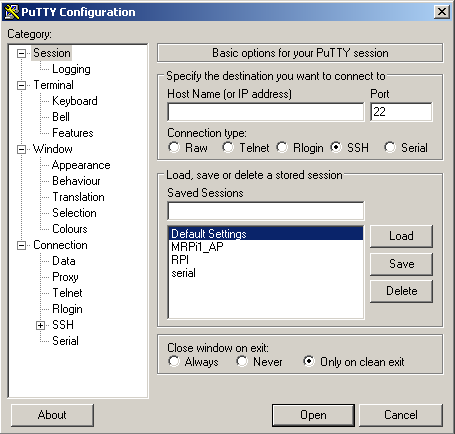
Démarrer le logiciel Putty :
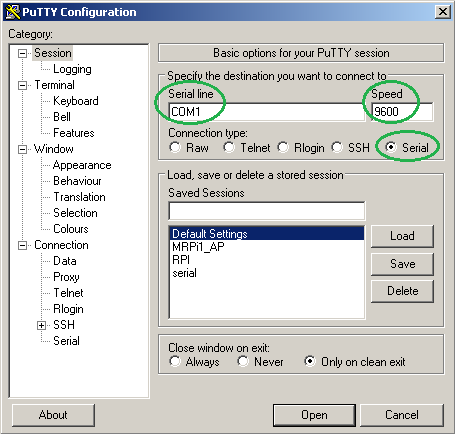
Sélectionner Serial comme type de connexion :
Serial Line : le nom du port COM
Speed : vitesse en baud
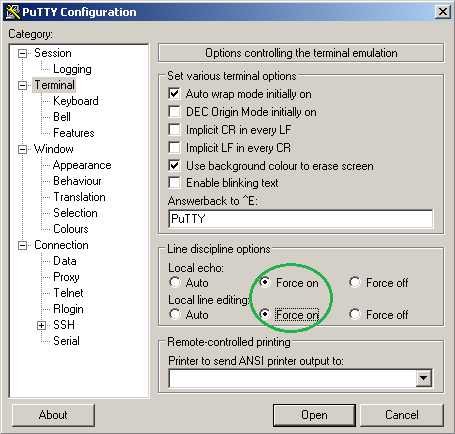
Configuration pour la saisie des commandes en entrée :
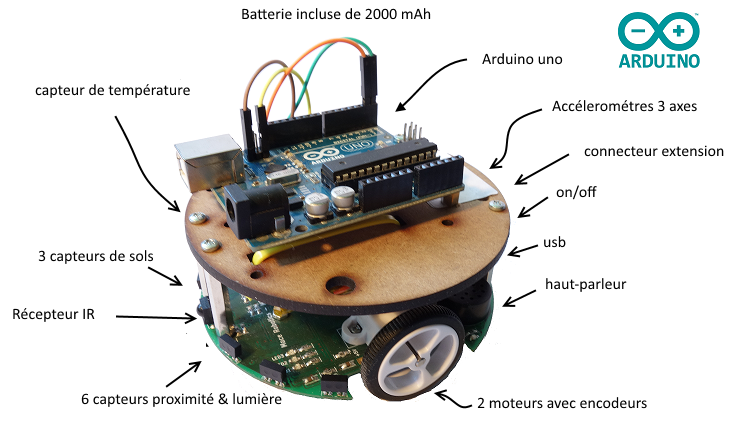
Nouvelle vidéo, une course de deux robots MRPi1 complétement autonome :
Un robot MRPi1 version Raspberry Pi,
Un robot MRPi1 version Arduino,
Les deux robots sont programmés pour suivre le chemin tous en évitant les obstacles. Le robot MRPi1 version Raspberry Pi est programmer en langage Python et la version arduino en langage arduino.
Voici le programme en langage Python pour le MRPi1 Raspberry Pi :
# importez la librairie du robot MRPi1
from mrpi1_lib import *
import time
# initialisation de la vitesse
speedFast=50
speedSlow=30
# seuil détection obstacle
limit_obs = 300
try:
while 1:
# lecture des capteurs de proximité
prox1 = proxSensor(1)
prox2 = proxSensor(2)
prox3 = proxSensor(3)
prox4 = proxSensor(4)
prox5 = proxSensor(5)
prox6 = proxSensor(6)
# si obstacle présent sur tous les capteurs
if prox1>limit_obs and prox2>limit_obs and prox3>limit_obs and prox4>limit_obs and prox5>limit_obs and prox6>limit_obs:
# tourner à droite
turnRight(speedSlow)
elif prox4>limit_obs or prox5>limit_obs or prox6>limit_obs:
# si obstacle à droite, tourner à gauche
turnLeft(speedSlow)
elif prox1>limit_obs or prox2>limit_obs or prox3>limit_obs:
# si obstacle à gauche, tourner à droite
turnRight(speedSlow)
else:
# sinon avancer
forward(speedFast)
time.sleep(0.4)
except:
stop()
exit()
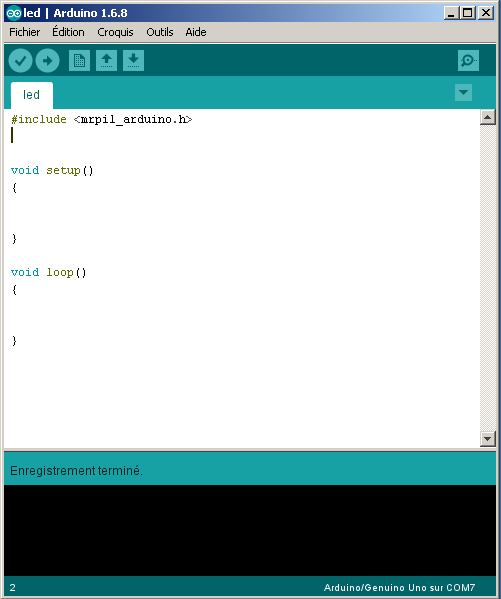
Le programme en langage arduino pour le MRPi1 version Arduino :
// librairies du robot MRPi1
#include <mrpi1_arduino.h>
// variables pour les capteurs de proximité
int prox1;
int prox2;
int prox3;
int prox4;
int prox5;
int prox6;
// initialisation de la vitesse
int speed = 60;
// initialisation de seuil des obstacles
int limit_obs = 300;
void setup()
{
// initialisation du port série
Serial.begin(115200);
}
void loop()
{
// lecture des capteurs de proximité
prox1 = proxSensor(1);
prox2 = proxSensor(2);
prox3 = proxSensor(3);
prox4 = proxSensor(4);
prox5 = proxSensor(5);
prox6 = proxSensor(6);
// Si obstacles présent sur tous les capteurs
if((prox1 > limit_obs) and (prox2 > limit_obs)and (prox3 > limit_obs) and (prox4 > limit_obs) and (prox5 > limit_obs) and (prox6 > limit_obs))
{
// reculer
back(speed);
}
else
{
// si obstacle à gauche
if((prox1 > limit_obs) and (prox2 > limit_obs))
{
// tourner à droite
turnRight(speed);
}
else
{
// si obstacle à droite
if((prox6 > limit_obs) or (prox5 > limit_obs) or (prox4 > limit_obs))
{
// tourner à gauche
turnLeft(speed);
}
else
{
// si obstacle à gauche
if((prox1 > limit_obs) or (prox2 > limit_obs) or (prox3 > limit_obs))
{
// tourner à droite
turnRight(speed);
}
else
{
// sinon avancer
forward(speed);
}
}
}
}
}
Voici une petite vidéo du robot contrôlé par l’Arduino :
Le programme réalise sous l’IDE arduino :
// initialisation des variables
int prox_1;
int prox_2;
int prox_3;
int prox_4;
int prox_5;
int prox_6;
int speed = 60;
void setup()
{
// initialisation du port série
Serial.begin(115200);
// Allumer les 3 leds du robot
led(1,1);
led(2,1);
led(3,1);
}
void loop()
{
// Lectures des capteurs de proximité
prox_1 = proxSensor(1);
prox_2 = proxSensor(2);
prox_3 = proxSensor(3);
prox_4 = proxSensor(4);
prox_5 = proxSensor(5);
prox_6 = proxSensor(6);
// Si obstacle à gauche
if(( prox_1 > 500) or (prox_2 > 500))
{
// tourner à droite
turnRight(speed);
}
// Si obstacle à droite
if(( prox_6 > 500) or ( prox_5 > 500))
{
// tourner à gauche
turnLeft(speed);
}
// Si obstacle devant
if(( prox_3 > 500) or ( prox_4 > 500))
{
// tourner à gauche
turnLeft(speed);
}
// si pas d'obstacle
if((prox_1 < 500) and (prox_2 < 500) and (prox_3 < 500) and (prox_4 < 500) and (prox_5 < 500) and (prox_6 < 500))
{
// avancer
forward(speed);
}
}