Une vidéo du robot prototype quadrupède BORVO au salon Tech’inn Vitré :
- Teensys 3.5
- 8 servomoteurs
Une vidéo du robot prototype quadrupède BORVO au salon Tech’inn Vitré :
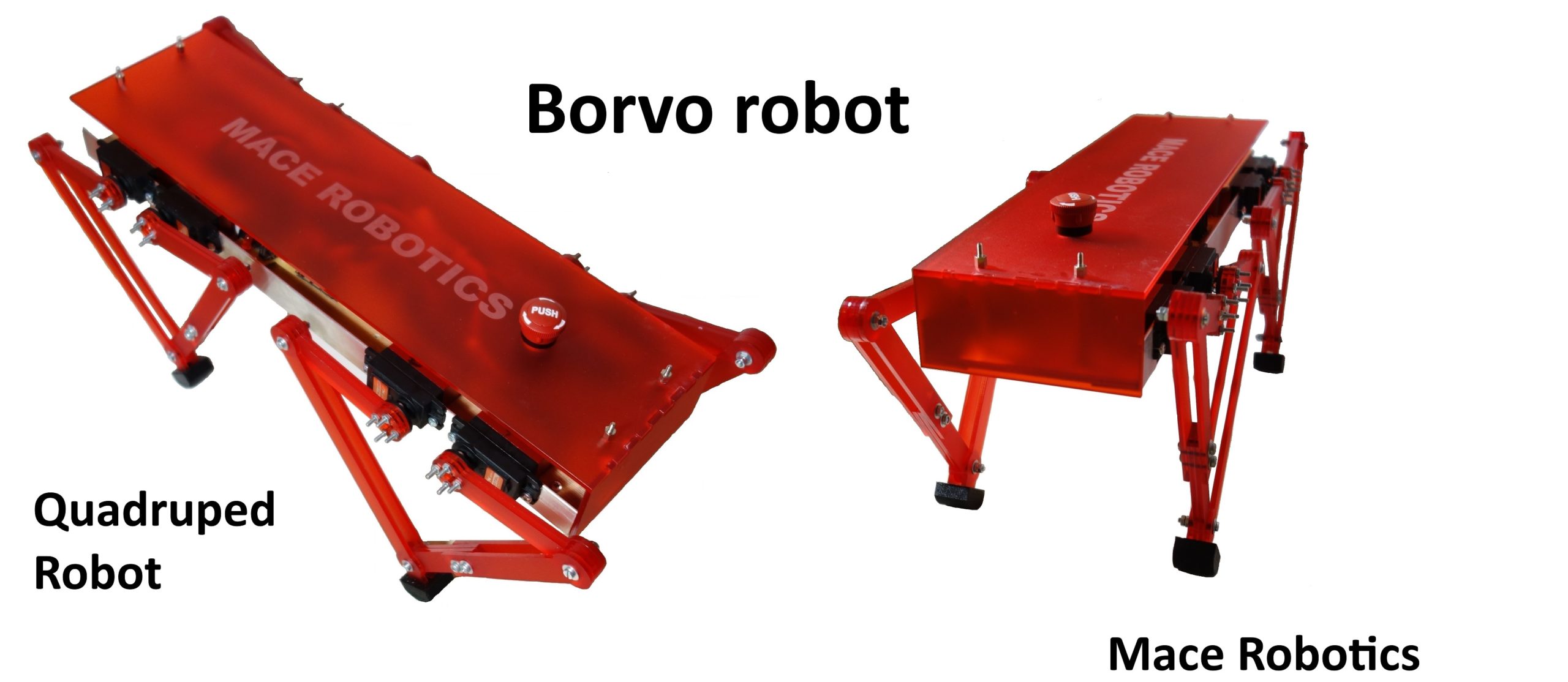
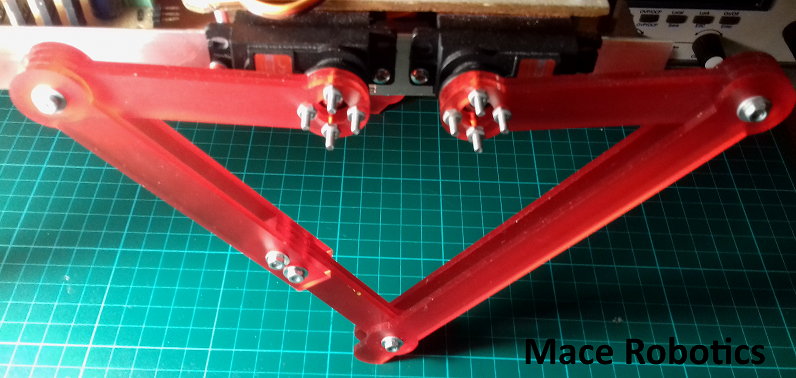
Mace Robotics presents the new design for the BORVO quadruped robot, with more bio-inspired legs:

I use 2D CAD software (QCAD) for drawing the legs:
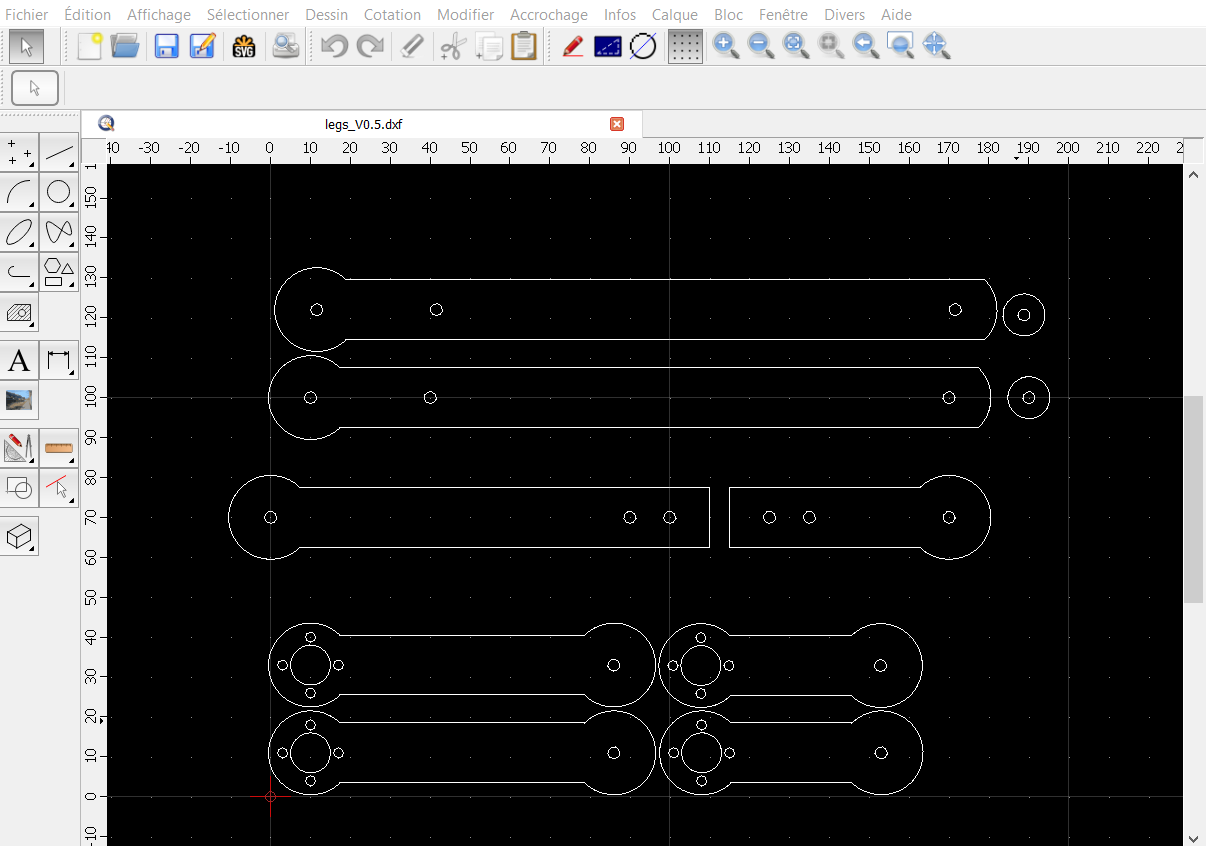
The robot uses 8 JX PDI-6221MG servo motors with a torque of 20 kg. Every leg is equipped with two servomotors with in parallel operation.
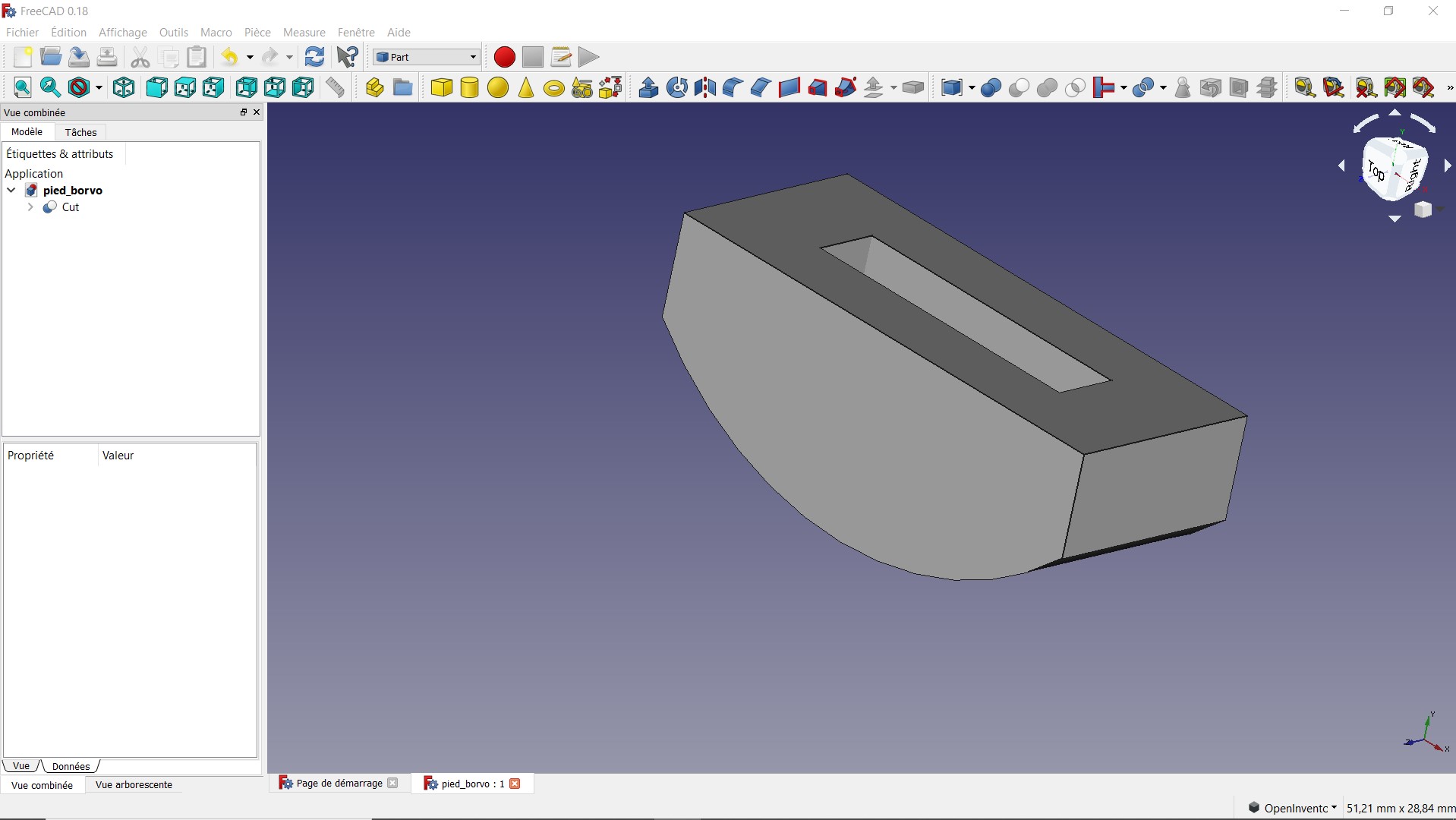
I use FreeCAD software to check the reverse kinematics calculations of the legs.

The robot uses a Teensys 3.5 microcontroller to program with Arduino IDE. For the moment, no inertial sensor or foot contacting sensors are used.
Des roues de 34 mm de diamètre sont disponibles en boutique :
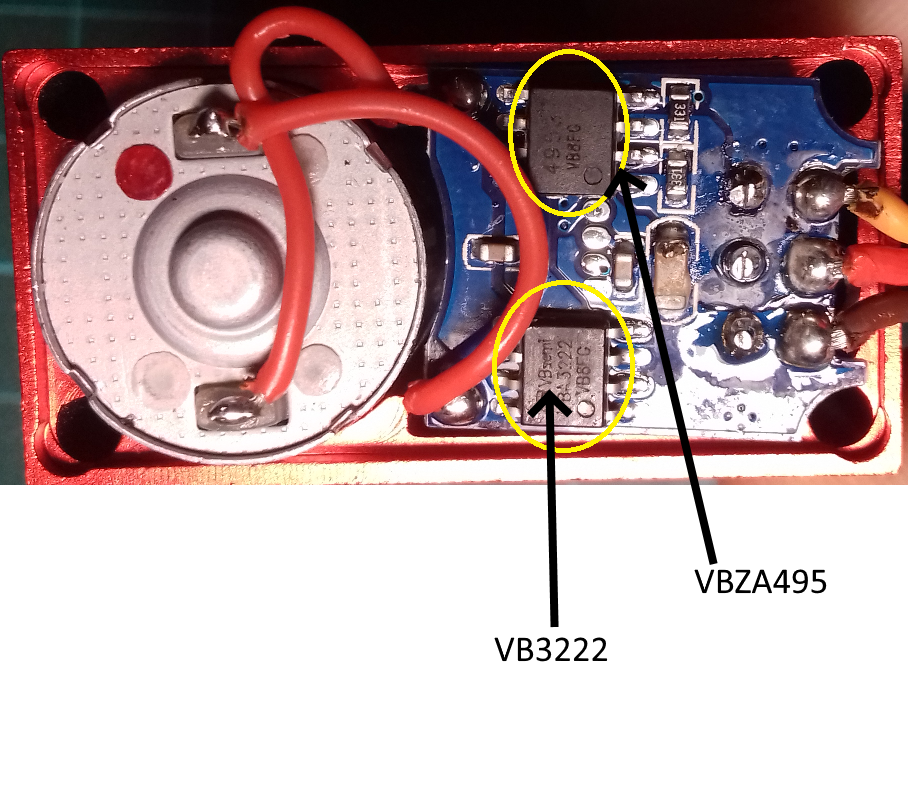
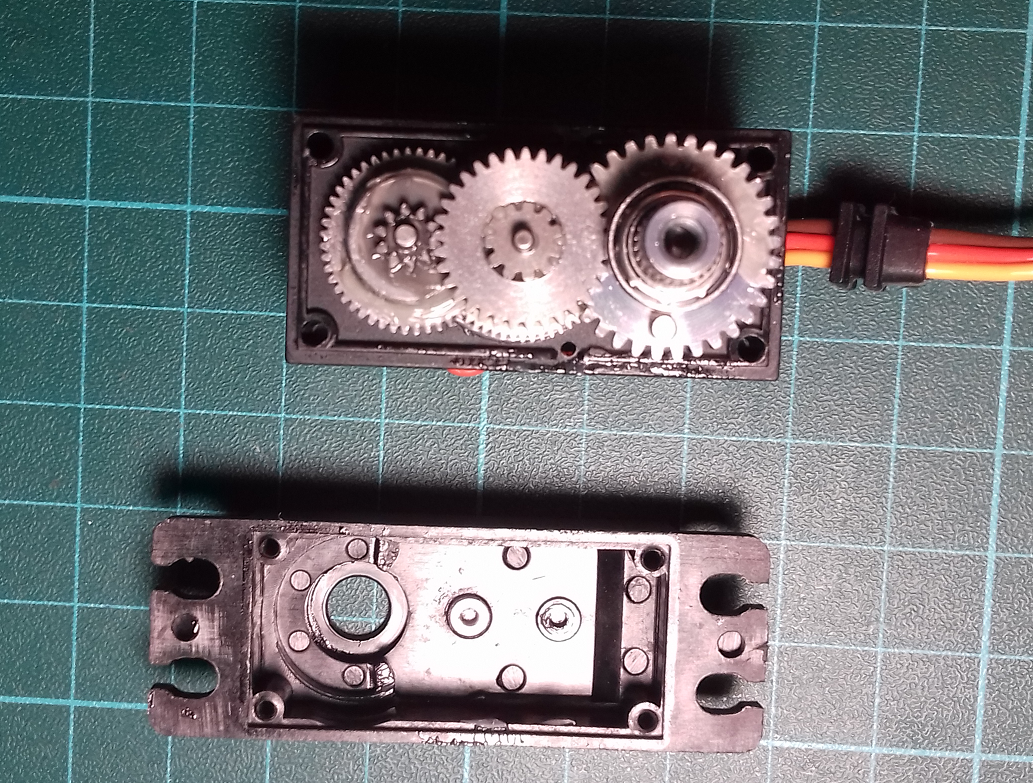
Inside the PDI-6221MG servomotor :
Dual N-Mosfet : VB3222 (www.VBsemi.com)
Dual P-Mosfet : VBZA495 (www.VBsemi.com)

Une nouvelle structure mécanique pour le robot quadrupède BORVO:
Plus d’informations sur le projet : https://fr.macerobotics.com/robot-borvo/
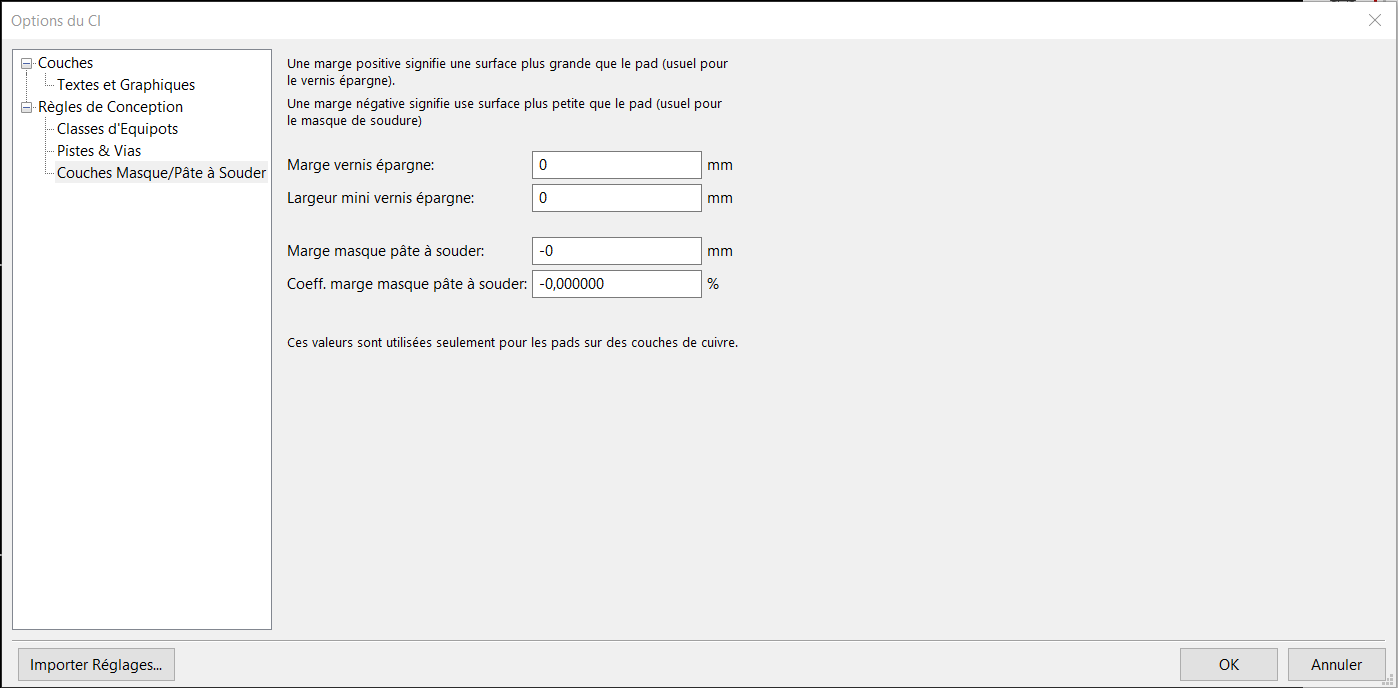
Le vernis épargne est une fine couche de résine polymère souvent de couleur verte permettant de protéger le cuivre de l’oxydation et empêcher la formation de court-circuit entre les pistes ou pads d’un composant CMS.
Une marge du vernis épargne trop grande peut supprimer l’épargne nécessaire entre les pads d’un composant CMS :
Couche masque de soudure coté top (F-Mask), fichier gerber .gts :
Les pads du composants seront bien entourés de vernis épargne :
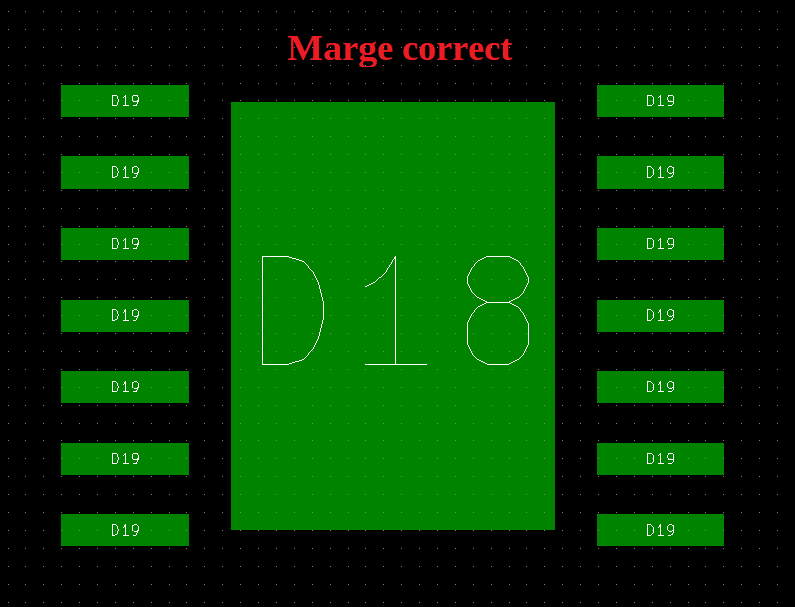
Les pads du composants ne seront pas bien entourés de vernis épargne :

Dans PCBnew :
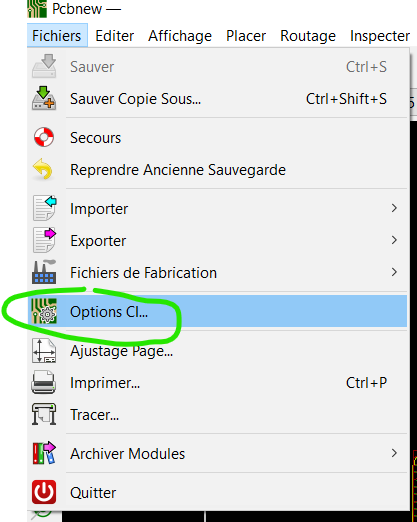
Options du CI :
Fin.
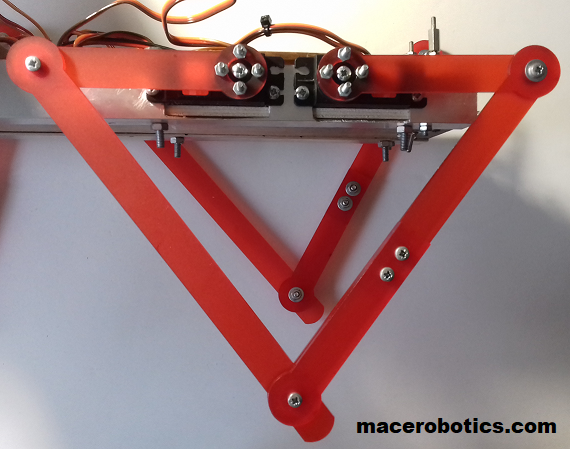
Nouveau design pour le robot quadrupède Borvo.

Les nouvelles pattes plus rigide vont permettre d’améliorer la stabilité du robot lors des déplacements et de moins glisser au sol.
New design for the legs of the quadruped robot to improve rigidity.
The new legs for the Borvo robot with pmma 3 mm materials.
I draw foot for the quadruped robot with FreeCAD software :