Un nouveau robot mobile est en cours de tests après plusieurs semaines de conception.
Il sera disponible dans quelques semaines.
- 2 roues
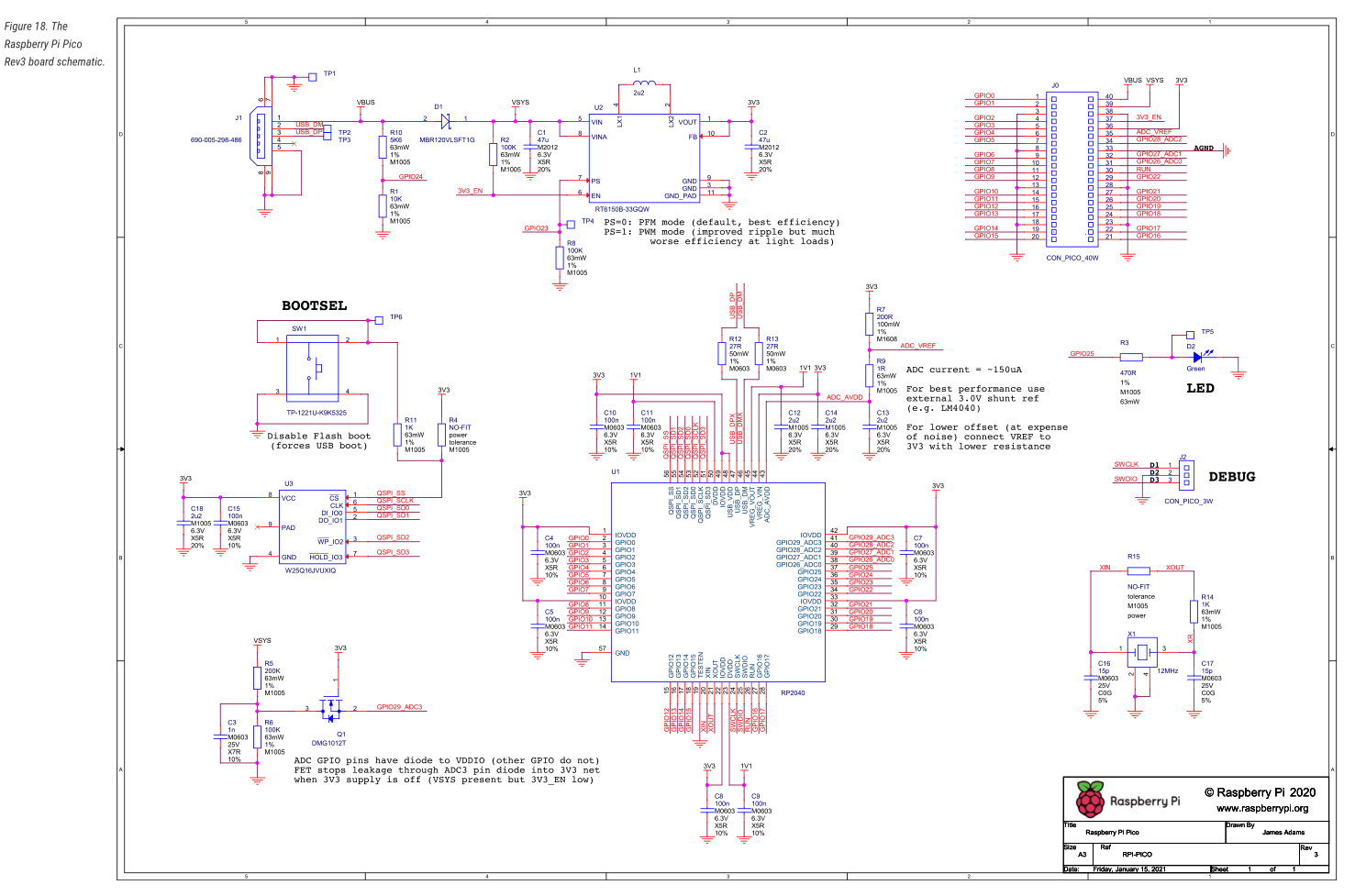
- Raspberry Pi Pico
- Capteurs ToF
- Encodeurs
- Led RGB
- Buzzer
- Pince parallèle
- Rechargement de la batterie par micro-usb