https://youtu.be/DQLK-vAj6tc
Category: robot
Chenillard avec MRduino Wireless
Exemple de chenillard avec le robot MRduino Wireless :
#include <mrduino.h>
void setup()
{
// init serial interface
Serial.begin(115200);
}
void loop()
{
led(1,1);
delay(1000);
led(2,1);
delay(1000);
led(3,1);
delay(1000);
led(3,0);
delay(1000);
led(2,0);
delay(1000);
led(1,0);
delay(1000);
}
Programmer MRduino Wireless en Wifi
Le robot MRduino Wireless a la possibilité de transférer le programme du PC vers le robot en communication Wifi.
Le programme
Ce programme permet d’activer le téléversements OTA (Over The Air) sur l’ESP8266 du robot.
- Ouvrer l’Arduino IDE et insérer ce programme :
En modifiant :
- VOTRE_SSID : le nom de votre réseau sans fil.
- VOTRE_MOT_DE_PASSE : le mot de votre réseau sans fil.
#include <mrduino.h> #include <ESP8266WiFi.h> #include <WiFiUdp.h> #include <ArduinoOTA.h> const char* ssid = "VOTRE_SSID"; const char* password = "VOTRE_MOT_DE_PASSE"; void setup() { // initialisation du wifi WiFi.begin(ssid, password); // connexion wifi while (WiFi.waitForConnectResult() != WL_CONNECTED) { delay(1500); ESP.restart(); } ArduinoOTA.setHostname("Robot_MRduinoW"); // initialisation de l'Over The Air ArduinoOTA.begin(); } void loop() { ArduinoOTA.handle(); }
Après avoir vérifié ce programme Arduino, vous pouvez le téléverser vers le robot via un câble micro-USB.
Transfére en Wifi
Maintenant que vous avez programmer le robot, vous pouvez fermer le logiciel Arduino IDE et le redémarrez afin d’avoir une nouvelle option de programmation.
- Ouvrez l’onglet Tools->Port :
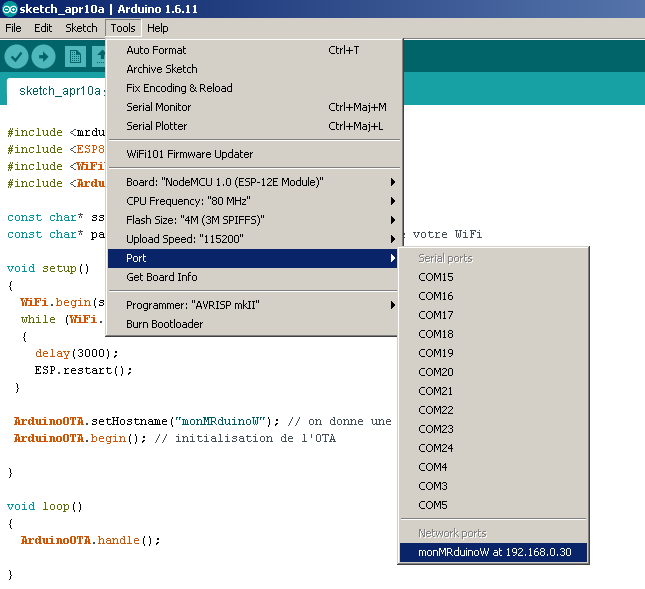
- Sélectionner le port : monMRduinoW
Vous pouvez débrancher le câble série de type micro-USB entre votre robot et le PC; et téléverser à nouveau le programme. Cette fois-ci, le téléversement fonctionne en Wifi.
Fin du tuto !
Présentation du robot MRduino Wireless
MRPi1 robot navigation “cleaning algorithm”
https://youtu.be/2khTwDcWwGw
Le programme :
from mrpi1_lib import * import time obs_limit = 600 # main program state = 1 while 1: x1 = proxSensor(3) x2 = proxSensor(4) if(( x1 > obs_limit)and( x2 > obs_limit)and(state == 1)): x1 = 0 x2 = 0 stop() time.sleep(1) state = 2 controlEnable() turnRight_degree(10,90) forward_mm(10, 100) turnRight_degree(10,90) if(( x1 > obs_limit)and( x2 > obs_limit)and(state == 2)): x1 = 0 x2 = 0 stop() time.sleep(1) state = 2 controlEnable() turnLeft_degree(10,90) forward_mm(10, 100) turnLeft_degree(10,90) state = 1 else: forward(20)
Mise à jour du robot MRPi1
Une mise à jour pour le robot MRPi1 est disponible sur GitHub :
https://github.com/macerobotics/MRPi1
- Pour mettre à jour le Firmware (version : 0.92) du robot MRPi1 :
Mise à jour firmware du microcontrôleur
- Ensuite, mise à jour de la librairie Python :
- Télécharger les fichiers __init__.py et mrpi1.py sur GitHub.
Puis transférer ces fichiers sur le robot avec FileZilla, puis installation la librairie :
>> cd /home/pi/Desktop/MR_Projects/ >> sudo python setup.py install
Les nouvelles fonctions disponibles :
- Lecture de la position du robot :
- robotPositionX()
- robotPositionY()
Retourne une valeur en millimètre.
De plus, le déplacement du robot à été améliorer avec les fonctions : forward(), back(), turnLeft(), turnRight().
Pour vérifier la version du firmware avec Python :
>> firmwareVersion() 0.92