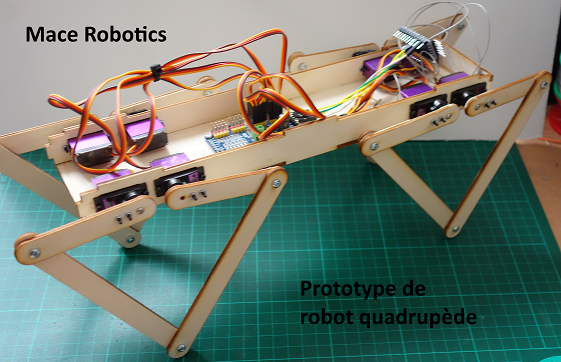
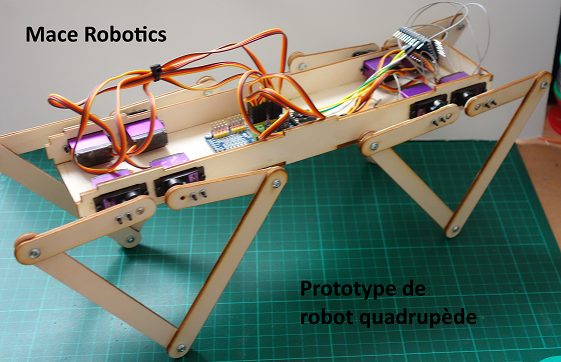
Mace Robotics a participé à la Toulouse Robot Race 2019 dans la catégorie multipattes avec le robot quadrupède Borvo. Le robot Borvo à terminer à la 2éme place dans la catégorie multipattes.
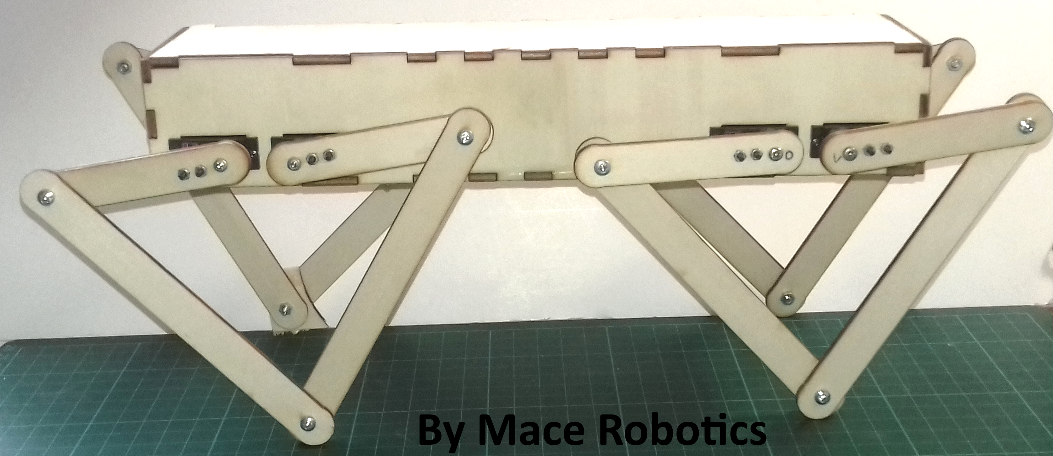
Robot Borvo

Caractéristiques du robot quadrupède Borvo :
- 8 servomoteurs JX PDI-6221MG 20KG
- Microcontrôleur : teensys 3.5 (compatible avec Arduino)
- 2x capteurs de distance VL53L0X à droite et gauche du robot. Pour le recalage en orientation du robot avec les bordures de la piste.
- 1 capteur LIDAR TFmini-Plus pour la détection du portique de la fin de la course.
- Batterie LiPo 2S
- Mécanique : bois peuplier 3 mm (découpé au laser)
- Bouton ON/OFF
- Switch start
- Bouton arrêt urgence
- Taille : 400 x 105 x 160 mm

Voici quelques robots rencontré à la Toulouse Robot Race :
- Robot humanoïde de l’équipe Rhoban (http://rhoban.com/fr/)

- Voiture autonome avec carte NVDIA Jetson GPU (équipe TurboDroid )

- Bipède avec servomoteurs dynamixel (plus d’info):

La piste de course :

Les participants à la Toulouse Robot Race 2019 :

Plus d’informations :