Author: macerobotics
LTspice – générer un signal carré
Générer un signal carré avec le logiciel LTspice :
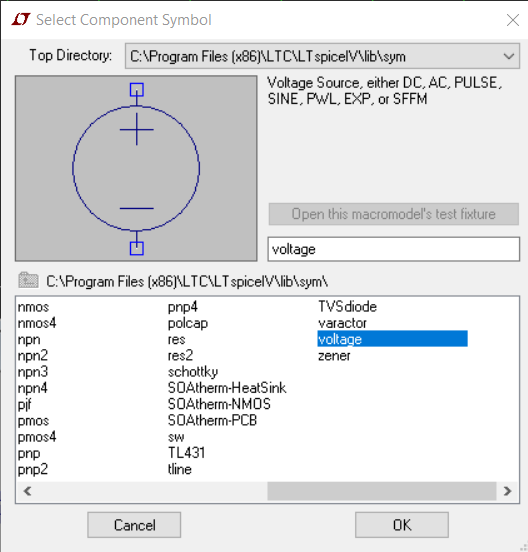
1-> Choisir la fonction PULSE dans le composant voltage:
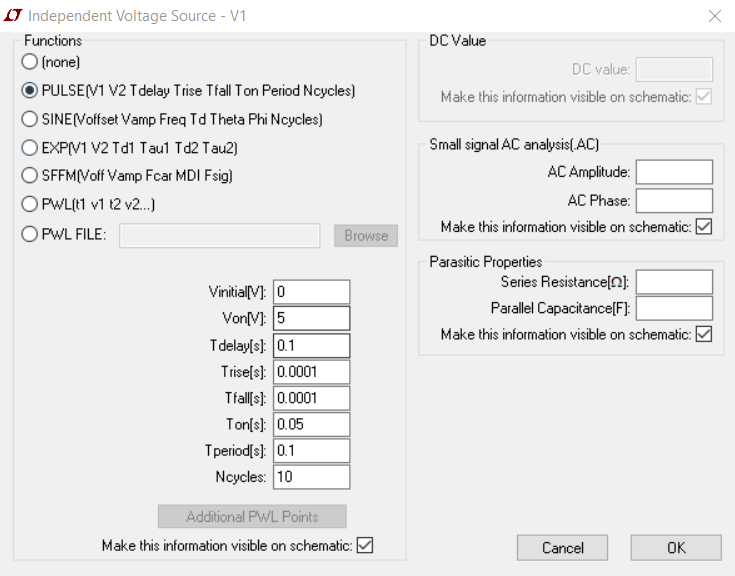
2 -> Exemple avec un signal carré de 0-5V de 10 hz :
- Période : 0.1 s
- Rapport cyclique : 50%
- Temps de montée : 100 µs
- Temps descente : 100 µs
- Tension Low level : 0V
- Tension High level : 5V
Fin.
Control a mobile robot by using keyboard – Python
An example python program for control a mobile robot with keyboard:
- keyboard control
- serial communication
Cinématique inverse avec python, Tinyik
Tinyik, une bibliothèque en langage python pour résoudre les calculs de cinématique inverse, bien utile en robotique :
Installation de Tinyik
Installation de la bibliothèque avec pip:
$ pip install tinyik
Sources :
Régulateur USB 5V pour dynamo de vélo
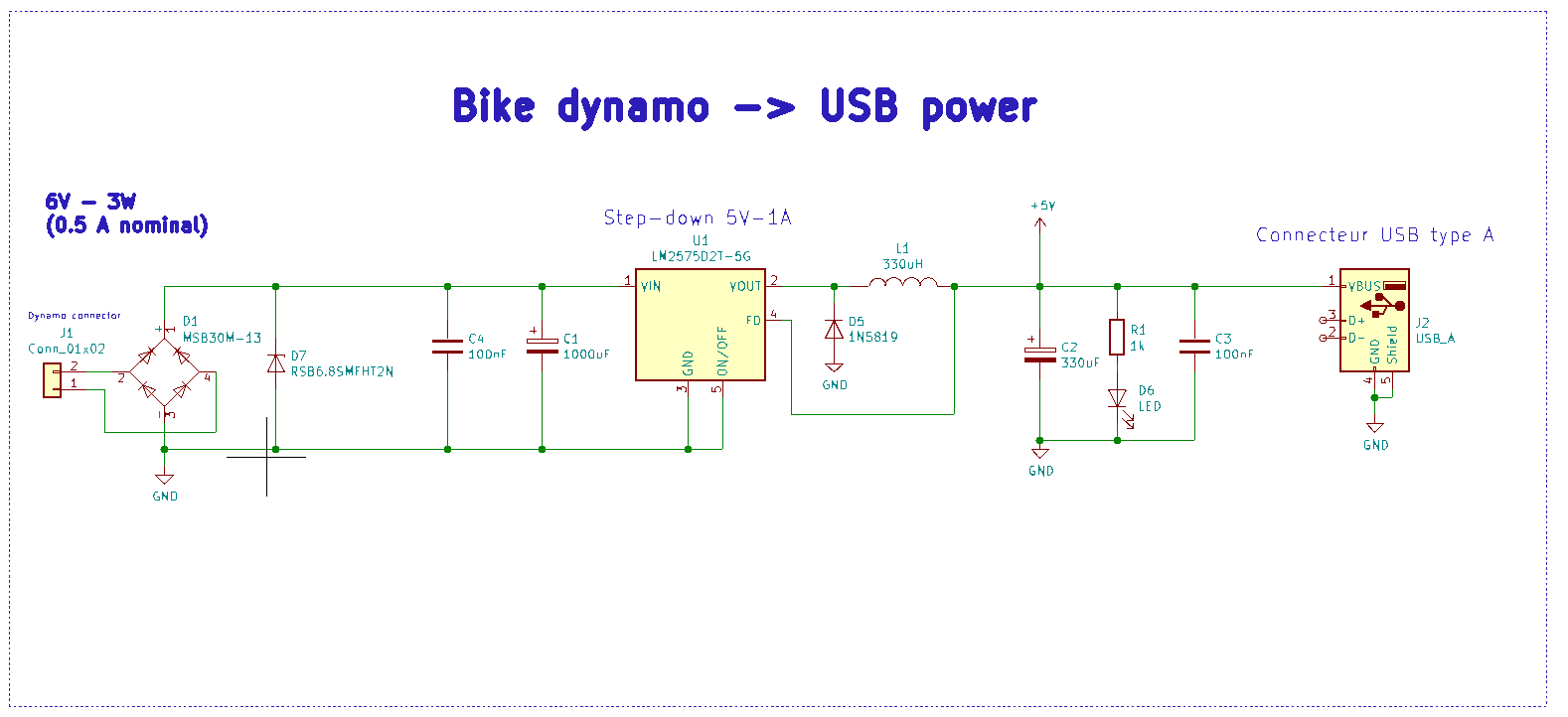
Un schéma électronique pour obtenir une tension 5V sur un connecteur USB à partir d’une dynamo de vélo. Une dynamo de vélo délivre une tension alternative monophasée de 6V et une puissance maximale de 3W.
Le schéma électronique
- Pont de diode, diode zener 6.8V
- Régulateur step-down LM2575,
- Condensateur de sortie,
- Led,
- Connecteur USB
Borvo A1 – Tech’inn Vitré – quadruped robot
Une vidéo du robot prototype quadrupède BORVO au salon Tech’inn Vitré :
- Teensys 3.5
- 8 servomoteurs
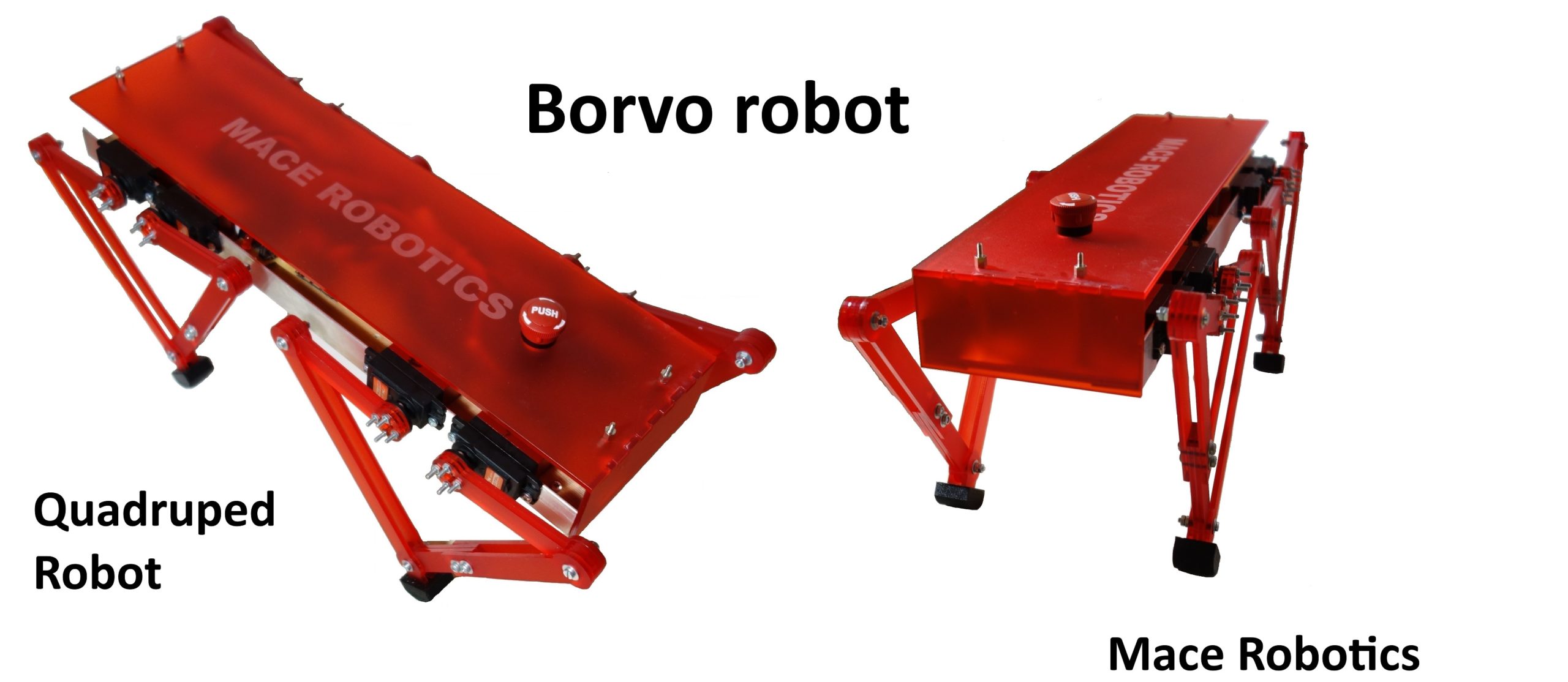
New design, quadruped – BORVO
Mace Robotics presents the new design for the BORVO quadruped robot, with more bio-inspired legs:

I use 2D CAD software (QCAD) for drawing the legs:
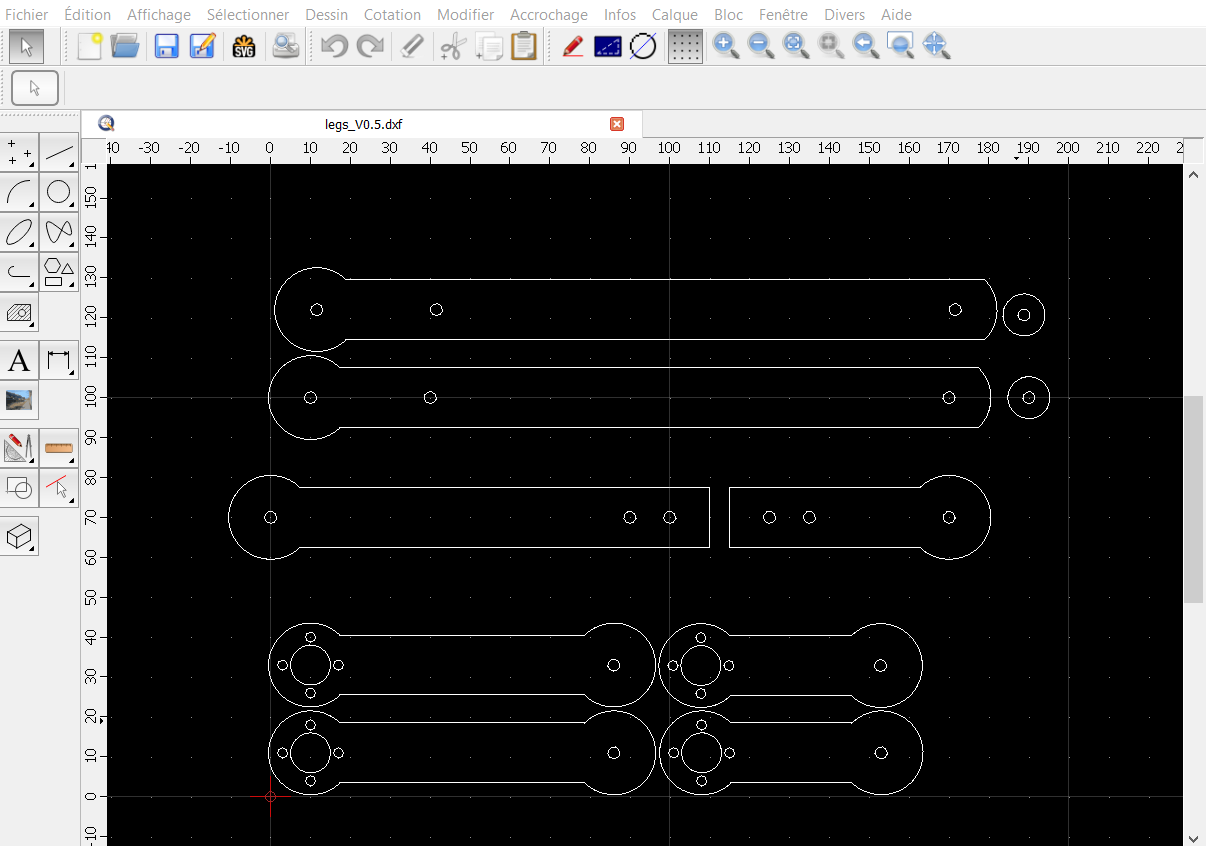
The robot uses 8 JX PDI-6221MG servo motors with a torque of 20 kg. Every leg is equipped with two servomotors with in parallel operation.
I use FreeCAD software to check the reverse kinematics calculations of the legs.

The robot uses a Teensys 3.5 microcontroller to program with Arduino IDE. For the moment, no inertial sensor or foot contacting sensors are used.
Nouveau produit en boutique
Des roues de 34 mm de diamètre sont disponibles en boutique :
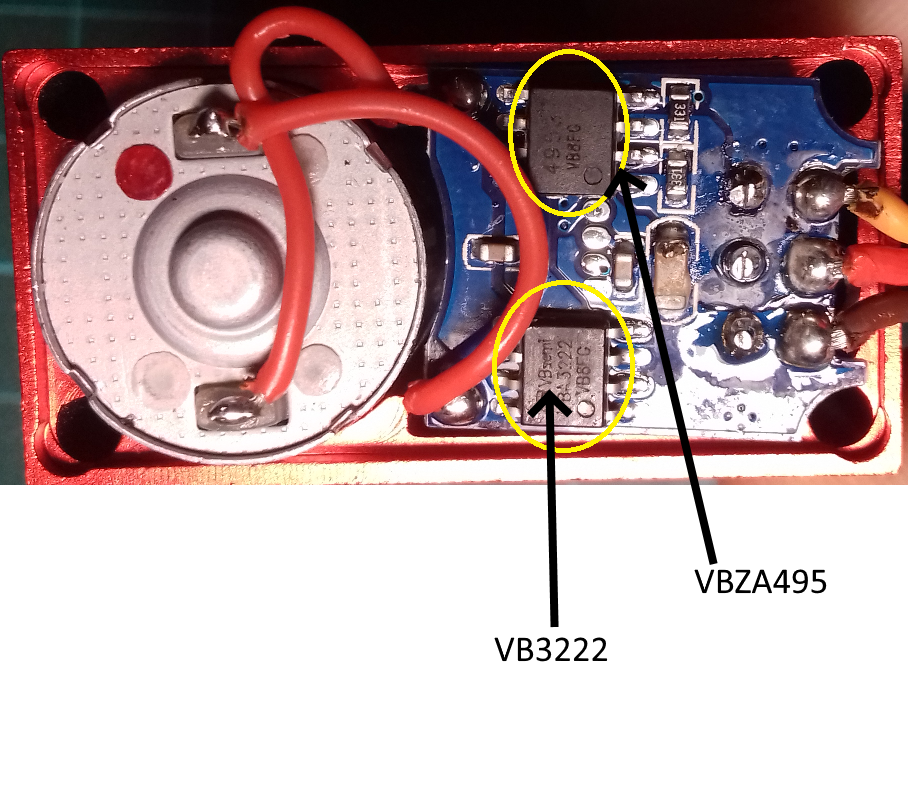
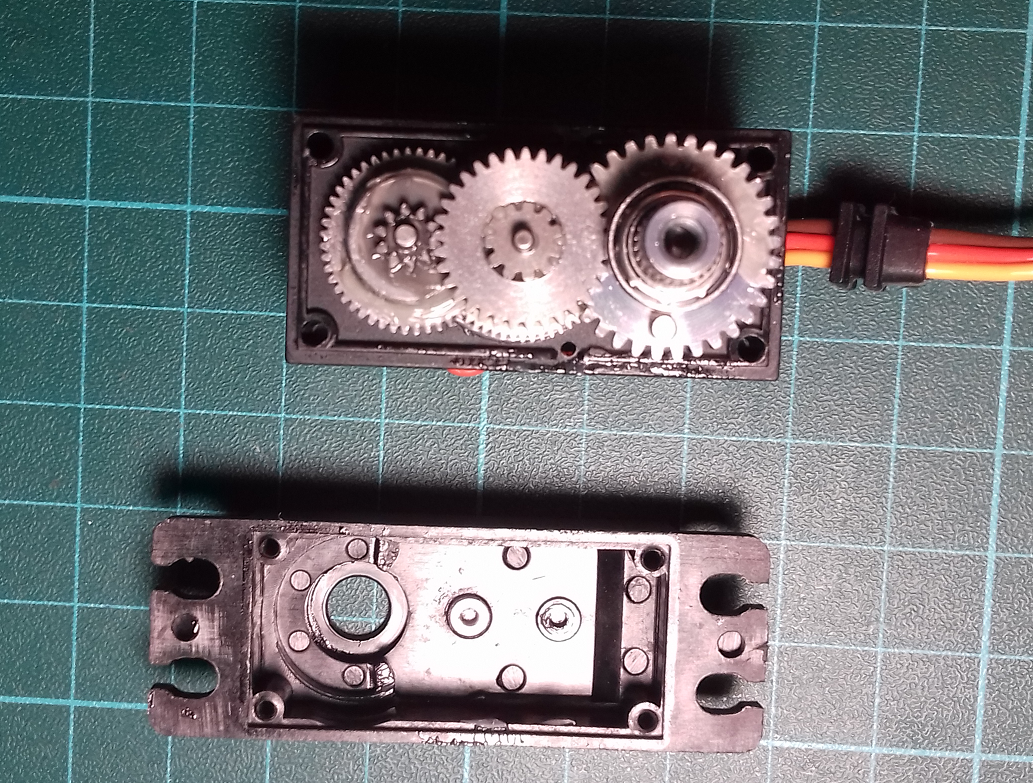
Inside PDI-6221MG servomotor
Inside the PDI-6221MG servomotor :
Microcontrollers:
- STM8S003F3
- 8-bit MCU with 8 Kbytes Flash, 16 MHz CPU, integrated EEPROM
- 16 MHz
H-Bridge :
Dual N-Mosfet : VB3222 (www.VBsemi.com)
-
-
- VDS max : 20V
- ID max : 4.8A
-
Dual P-Mosfet : VBZA495 (www.VBsemi.com)
-
- VDS max : -30V
- ID max : -7.3A
Metal gear :

Nouvelle structure
Une nouvelle structure mécanique pour le robot quadrupède BORVO:
- structure en pmma 3 mm
- pied souple en impression 3D
- pattes plus rigide
Plus d’informations sur le projet : https://fr.macerobotics.com/robot-borvo/